Escolha dos leitores





Artigos populares
Ciência da computação, cibernética e programação
A cabeça de leitura/gravação em qualquer unidade de disco consiste em um núcleo ferromagnético em forma de U e uma bobina (enrolamento) enrolada em torno dele, através da qual a corrente elétrica pode fluir. Quando a corrente passa pelo enrolamento, um campo magnético é criado no núcleo (circuito magnético) do cabeçote. Ao mudar a direção da corrente que flui, a polaridade do campo magnético também muda. Em essência, as cabeças são eletroímãs
Dispositivo de disco rígido discos magnéticos.
|
Camada de trabalho do disco Cabeças de ferrite Cabeças com metal na lacuna Cabeças de filme fino Cabeças magnetorresistivas Cabeças magnetorresistivas gigantes Controle deslizante Design de moldura com cabeças de leitura/gravação Mecanismos de acionamento principal Acionamento por motor de passo Acionamento da bobina móvel Opinião Motor de ignição Painel de controle Painel frontal Cabos e conectores de unidade Itens de configuração |
A cabeça de leitura/gravação em qualquer unidade de disco consiste em um núcleo ferromagnético em forma de U e uma bobina (enrolamento) enrolada em torno dele, através da qual a corrente elétrica pode fluir. Quando a corrente passa pelo enrolamento, um campo magnético é criado no núcleo (circuito magnético) do cabeçote (Fig. 1). Ao mudar a direção da corrente que flui, a polaridade do campo magnético também muda. Em essência, as cabeças são eletroímãs cuja polaridade pode ser alterada muito rapidamente mudando a direção da corrente elétrica que passa.
Na Fig. A Figura 2 mostra o princípio de registro de informações. O campo magnético no núcleo se espalha parcialmente no espaço circundante devido à presença de uma lacuna “serrada” na base do núcleo em forma de U. Se outro ferromagneto (camada transportadora de trabalho) estiver localizado próximo à lacuna, então o campo magnético está localizado nele, uma vez que tais substâncias têm menor resistência magnética que o ar.
Fig.2 Princípio de registro de informações
O fluxo magnético que atravessa a lacuna é fechado através do portador, o que leva à polarização de suas partículas magnéticas (domínios) na direção do campo. A direção do campo e, portanto, a magnetização remanescente do portador depende da polaridade do campo elétrico no enrolamento principal. Os discos magnéticos flexíveis geralmente são feitos em lavsan, e os duros em substrato de alumínio ou vidro, sobre o qual é aplicada uma camada de material ferromagnético. A camada de trabalho consiste principalmente em óxido de ferro com vários aditivos. Os campos magnéticos criados por domínios individuais em um disco limpo são orientados aleatoriamente e são mutuamente compensados em qualquer porção estendida (macroscópica) da superfície do disco, de modo que sua magnetização remanente é zero.
Se uma seção da superfície do disco, quando puxada para perto da abertura da cabeça, for exposta a um campo magnético, então os domínios estarão alinhados em uma determinada direção e seus campos magnéticos não mais se cancelarão. Como resultado, aparece magnetização residual nesta área, que pode ser detectada posteriormente. Que. como resultado do fluxo corrente alternada forma de pulso no enrolamento da cabeça de leitura/escrita no disco giratório, uma sequência de seções com magnetização residual de sinal (direção) diferente é formada.
Para a posterior reprodução da informação gravada, as mais importantes são aquelas zonas em que muda a direção do campo magnético residual (zonas de mudança de sinal). A cabeça magnética grava dados no disco, colocando nele zonas de mudança de sinal. À medida que cada bit (ou bits) de dados é gravado, uma sequência de zonas de mudança de sinal é organizada em áreas especiais do disco. Essas áreas são chamadas de células de bits.
Célula de bits esta é uma área especial no disco na qual o cabeçote coloca zonas de mudança de sinal. As dimensões geométricas de tal célula dependem de frequência do relógio o sinal de gravação e a velocidade com que a cabeça e a superfície do disco se movem uma em relação à outra. Uma célula de transição é uma área do disco na qual apenas uma zona de mudança de sinal pode ser escrita. Quando bits de dados individuais ou seus grupos são registrados nas células, um “padrão” característico de zonas de mudança de sinal é formado, dependendo do método de codificação da informação. Isso se deve ao fato de que durante o processo de transferência de dados para um meio magnético, cada bit (ou grupo de bits) é convertido por um codificador especial em uma série de sinais elétricos que não são uma cópia exata da sequência original de pulsos. .
Durante a leitura, o cabeçote se comporta como um detector de zona de mudança de sinal, produzindo pulsos de tensão cada vez que cruza uma zona de mudança de sinal. Nas áreas onde o sinal não muda, não são gerados pulsos (não há emissões).
Na Fig. A Figura 3 mostra graficamente a relação entre os formatos dos pulsos (sinais) durante a leitura e escrita e as zonas de mudança de sinal registradas no disco.
Durante a leitura, o cabeçote registra zonas de mudança de sinal e emite pulsos correspondentes - o sinal corresponde à tensão zero se não forem detectadas transições de sinal positivo para negativo ou vice-versa. Os pulsos aparecem apenas nos casos em que a cabeça cruza as zonas de mudança de sinal no meio magnético. O circuito controlador do dispositivo leva em consideração a frequência de repetição do clock, pulsos registrados, etc. determina se o pulso (e, portanto, a zona de mudança de sinal) cai em uma determinada célula de transição.
A amplitude do sinal gravado vindo da cabeça durante a leitura é muito pequena, portanto há um problema de ruído e interferência. Portanto, dispositivos altamente sensíveis são usados para amplificar o sinal. Após a amplificação, o sinal é enviado para circuitos de decodificação, que são projetados para restaurar um fluxo de dados idêntico ao que entrou no drive durante a gravação.
Assim, escrever e ler informações de um disco é baseado nos princípios do eletromagnetismo. Quando os dados são gravados em um disco, uma corrente elétrica passa por um eletroímã (a cabeça do dispositivo), resultando na criação de zonas magnetizadas que são armazenadas no disco. Os dados são lidos do disco à medida que a cabeça se move sobre sua superfície; neste caso, o cabeçote registra alterações nas zonas de magnetização e, como resultado, gera sinais elétricos fracos indicando a presença ou ausência de zonas de mudança de sinal nos sinais registrados.

Arroz. 3. Gravação e leitura de informações de um disco magnético
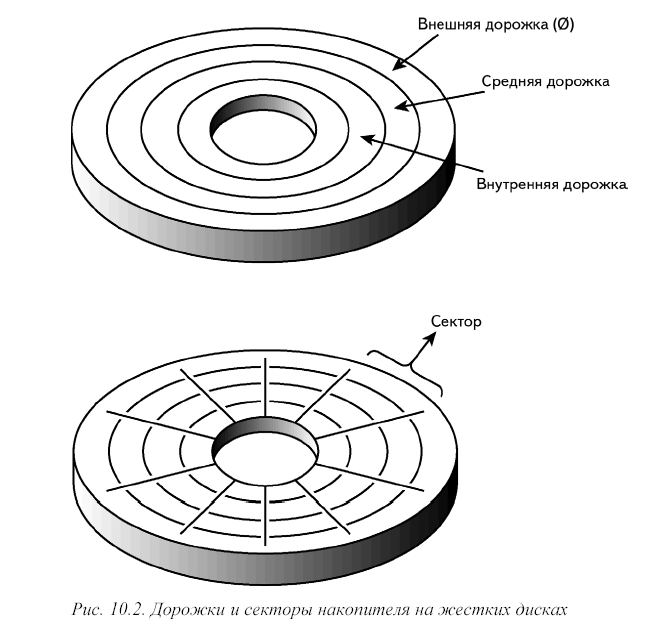
Nas unidades de disco rígido, os dados são gravados e lidos por cabeçotes universais de leitura/gravação a partir da superfície rotativa. discos magnéticos, dividido em trilhas e setores (512 bytes cada), conforme mostrado na Fig. 4.
As unidades geralmente possuem vários discos (pratos, travessas) instalados e os dados são gravados em ambos os lados de cada um deles. A maioria das unidades possui pelo menos dois ou três discos (permitindo a gravação em quatro ou seis lados). Trilhas do mesmo tipo (localizadas de forma idêntica) em todos os lados dos discos são combinadas em um cilindro (Fig. 5). Cada lado do disco possui sua própria trilha de leitura/gravação, mas todos os cabeçotes são montados em uma haste ou rack comum. Portanto, as cabeças não podem se mover independentemente umas das outras e apenas se moverem de forma síncrona.

Os discos rígidos giram muito mais rápido que as unidades de disquete. Suas velocidades de rotação são atualmente de 7.200, 10.000 e 15.000 rpm. Velocidade trabalhar duro A velocidade do disco depende de sua velocidade de rotação, da velocidade de movimento do sistema principal e do número de setores na trilha. No operação normal disco rígido As cabeças de leitura/gravação não tocam (e não devem tocar!) nos discos. Mas quando a energia é desligada e os discos param, eles afundam na superfície. Durante a operação do dispositivo, um espaço de ar muito pequeno (almofada de ar) é formado entre a cabeça e a superfície do disco rotativo. Se a poeira entrar nesta lacuna ou ocorrer um choque, a cabeça “colidirá” com o disco girando “a toda velocidade”. Se o impacto for forte o suficiente, a cabeça quebrará. As consequências disso podem variar desde a perda de alguns bytes de dados até a falha de todo o
Quase todos os discos rígidos consistem nos mesmos componentes básicos. Os designs destas unidades e a qualidade dos materiais utilizados podem ser diferentes, mas as suas características básicas de desempenho e princípios de funcionamento são os mesmos. Os principais elementos de design de uma unidade de disco rígido típica (Figura 6) incluem o seguinte:
Os discos, o motor da unidade de disco, os cabeçotes e o mecanismo de acionamento do cabeçote são normalmente alojados em uma caixa selada chamada HDA (Head Disk Assembly). Normalmente este bloco é tratado como um único nó; quase nunca é aberto. Outros componentes não incluídos na unidade HDA (PCB, painel, itens de configuração e peças de montagem) são removíveis.
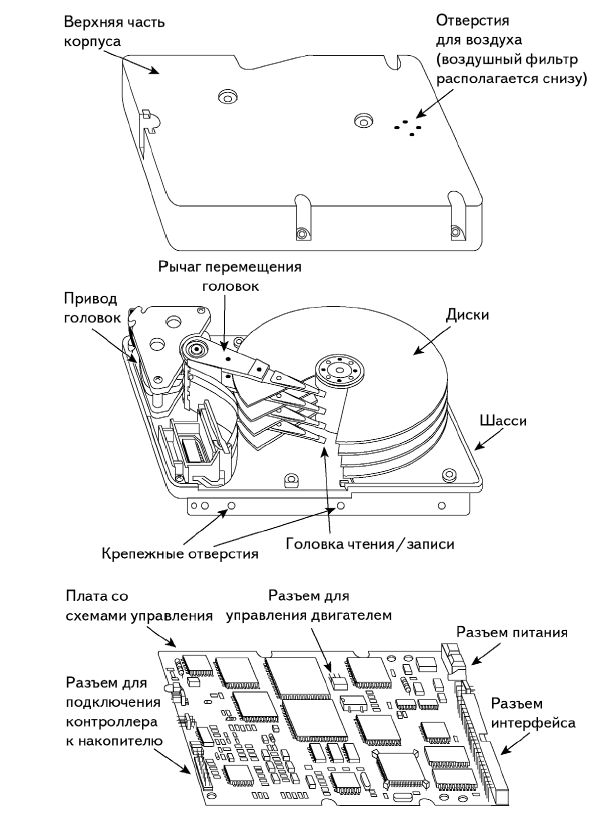
Arroz. 6 . Principais componentes de uma unidade de disco rígido
Normalmente, uma unidade contém um ou mais discos magnéticos. Vários tamanhos de unidade padrão foram estabelecidos, determinados principalmente pelo tamanho dos discos, a saber:
Existem também unidades com tamanhos de disco maiores, como 8 polegadas, 14 polegadas e até maiores, mas, via de regra, esses dispositivos não são utilizados em computadores pessoais. Hoje em dia, as unidades de 3,5 polegadas são mais frequentemente instaladas em modelos de desktop e em alguns modelos portáteis, e dispositivos de pequeno porte (formato de 2,5 polegadas e menores) são mais frequentemente instalados em sistemas portáteis.
A maioria das unidades vem com pelo menos duas unidades, embora alguns modelos menores tenham uma. O número de discos é limitado pelas dimensões físicas do drive, nomeadamente a altura da sua caixa. Anteriormente, quase todos os discos eram feitos de Liga de alumínio, bastante durável e leve. Mas com o tempo, surgiu a necessidade de unidades que combinassem tamanhos pequenos e alta capacidade. Portanto, o vidro, ou mais precisamente, um material compósito à base de vidro e cerâmica, passou a ser utilizado como principal material dos discos. Um desses materiais é chamado MemCor. É significativamente mais forte do que cada um dos seus componentes individuais. Os discos de vidro são mais fortes e rígidos, por isso podem ser feitos duas vezes mais finos que os de alumínio (e às vezes até mais finos). Além disso, eles são menos suscetíveis a mudanças de temperatura, ou seja, suas dimensões mudam ligeiramente quando aquecidas e resfriadas. Atualmente, algumas unidades de empresas como IBM, Seagate, Toshiba, Western Digital e Maxtor usam unidades de vidro ou vitrocerâmica.
Independentemente do material usado como base do disco, ele é coberto por uma fina camada de uma substância que pode reter a magnetização residual após a exposição a um campo magnético externo. Essa camada é chamada de camada de trabalho ou magnética, e é nela que ficam armazenadas as informações registradas. Os mais comuns são dois tipos de camada de trabalho -óxido e filme fino.
Óxido A camada é um revestimento de polímero preenchido com óxido de ferro. É aplicado da seguinte forma. Primeiro, uma suspensão de pó de óxido de ferro em uma solução de polímero é pulverizada na superfície de um disco de alumínio em rotação rápida. Devido à ação das forças centrífugas, ele se espalha uniformemente pela superfície do disco, do centro até a borda externa. Após a polimerização da solução, a superfície é polida. Em seguida, é aplicada outra camada de polímero puro, com resistência suficiente e baixo coeficiente de atrito, e o disco é finalmente polido. Quanto maior a capacidade de armazenamento, mais fina e lisa deve ser a camada de trabalho dos discos.
Acabou sendo impossível alcançar a qualidade de revestimento necessária para drives de alta capacidade usando tecnologia tradicional, uma vez que a camada de óxido é bastante macia e se desintegra quando “colidiu” com os cabeçotes (por exemplo, quando o drive é sacudido acidentalmente) . Portanto em modelos modernos drives, eles deram lugar completamente aos discos de película fina.
Camada de trabalho de filme finoÉ mais fino, mais resistente e a qualidade do seu revestimento é muito superior. Esta tecnologia serviu de base para a produção de drives de nova geração, nos quais foi possível reduzir significativamente o vão entre os cabeçotes e as superfícies do disco, o que possibilitou aumentar a densidade de gravação. No início, os discos de película fina eram usados apenas em unidades de alta qualidade e alta capacidade, mas agora são usados em quase todas as unidades. A camada de trabalho de filme fino também é chamadagalvanizado ou pulverizado , pois existem diferentes formas de aplicar uma película fina na superfície dos discos.
Camada de trabalho galvanizada de filme finoobtido por eletrólise. O substrato de alumínio do disco é sucessivamente imerso em banhos com diversas soluções, sendo recoberto por diversas camadas de película metálica. A camada de trabalho é uma camada de liga de cobalto com apenas cerca de 1 micropolegada de espessura (aproximadamente 0,025 mícron).Método de pulverização da camada de trabalhoemprestado da tecnologia de semicondutores. Sua essência se resume ao fato de que em câmaras de vácuo especiais substâncias e ligas são primeiro transferidas para o estado gasoso e depois depositadas no substrato. O disco de alumínio é primeiro revestido com uma camada de fosforito de níquel e depois com uma liga magnética de cobalto. Sua espessura é de apenas 12 micropolegadas (0,0250,05 mícrons). Da mesma forma, um revestimento protetor de carbono muito fino (cerca de 0,025 mícrons), que possui resistência excepcional, é aplicado no topo da camada magnética do disco. Este é o processo mais caro de todos os descritos acima, pois requer condições próximas do vácuo completo.
Como já foi observado, a espessura da camada magnética obtida por pulverização catódica é de cerca de 0,025 mícrons. Sua superfície excepcionalmente lisa permite que o espaço entre as cabeças e as superfícies do disco seja muito menor do que era possível anteriormente (0,076 mícrons). Quanto mais próximo o cabeçote estiver da superfície da camada de trabalho, maior será a densidade das zonas de mudança de sinal na trilha de gravação e, conseqüentemente, a densidade do disco. Além disso, à medida que a intensidade do campo magnético aumenta à medida que a cabeça se aproxima da camada magnética, a amplitude do sinal aumenta; Como resultado, a relação sinal-ruído torna-se mais favorável. Tanto com deposição galvânica quanto com pulverização catódica, a camada de trabalho é muito fina e durável. Portanto, a probabilidade de “sobrevivência” de cabeçotes e discos no caso de contato entre si em alta velocidade aumenta significativamente. Na verdade, unidades modernas com discos com camadas de trabalho de película fina praticamente não falham devido a vibrações e choques. Os revestimentos de óxido são muito menos eficazes nesse aspecto.
confiável. Se você olhar dentro do gabinete da unidade, verá que os revestimentos de película fina das unidades lembram a superfície prateada dos espelhos. O revestimento mais fino e durável é obtido durante o processo de pulverização, portanto o método galvânico Ultimamenteé usado cada vez menos.
À medida que a tecnologia de produção se desenvolve unidades de disco Os designs das cabeças de leitura/gravação também melhoraram. As primeiras cabeças eram núcleos com enrolamentos (eletroímãs). Pelos padrões modernos, seu tamanho era enorme e a densidade de gravação extremamente baixa. Ao longo dos anos, os designs de cabeçotes percorreram um longo caminho desde os primeiros cabeçotes com núcleo de ferrite até os tipos atuais.
Os quatro tipos de cabeçotes mais comumente usados em discos rígidos modernos são:
Cabeças de ferrite clássicas foram usadas pela primeira vez nas primeiras unidades IBM. Seus núcleos são feitos de ferrita prensada (à base de óxido de ferro). O campo magnético na lacuna ocorre quando a corrente elétrica flui através do enrolamento. Por sua vez, quando a intensidade do campo magnético muda perto da lacuna no enrolamento, uma força eletromotriz é induzida. Assim, a cabeça é universal, ou seja, pode ser usado tanto para escrita quanto para leitura. As dimensões e o peso das cabeças de ferrite são maiores do que as de película fina; portanto, para evitar os seus contactos indesejados com as superfícies dos discos, a folga tem de ser aumentada.
Durante a existência das cabeças de ferrite, seu design original (monolítico) foi significativamente melhorado. Em particular, foram desenvolvidas as chamadas cabeças de ferrite de vidro (compostas), cujo pequeno núcleo de ferrite é instalado em uma caixa de cerâmica. A largura do núcleo e a lacuna magnética dessas cabeças são menores, o que permite aumentar a densidade das trilhas de gravação. Além disso, a sua sensibilidade à interferência magnética externa é reduzida.
À medida que a capacidade de armazenamento aumentou, as cabeças de ferrite foram completamente substituídas por outros tipos. As cabeças de ferrite são inadequadas para gravação em mídias com alta coercividade, sua resposta de frequência é limitada e a sensibilidade é baixa (baixa relação sinal-ruído). A principal vantagem das cabeças de ferrite é o seu baixo custo.
As cabeças MIG Metal-In-Gap são o resultado de melhorias no design da cabeça de ferrite composta. Nessas cabeças, a lacuna magnética localizada na parte traseira do núcleo é preenchida com metal. Com isso, a tendência do material do núcleo à saturação magnética é significativamente reduzida, o que permite aumentar a indução magnética no vão de trabalho e, consequentemente, gravar no disco com maior densidade. Além disso, o gradiente do campo magnético criado pela cabeça com o metal na lacuna é maior, o que significa que áreas magnetizadas com limites mais claramente definidos são formadas na superfície do disco (a largura das zonas de mudança de sinal diminui) .
Estas cabeças permitem a utilização de meios com alta coercividade e uma fina camada de trabalho de filme. Ao reduzir a massa total e melhorar o design, tais cabeçotes podem ser localizados mais próximos da superfície da mídia.
As cabeças com metal na folga vêm em dois tipos: unilateral e dupla face (ou seja, com uma e duas folgas metalizadas). Nas cabeças unilaterais, a camada de liga magnética está localizada apenas na folga traseira (não funcional), e nas cabeças dupla-face, em ambas. A camada metálica é aplicada por deposição a vácuo. A indução de saturação de uma liga magnética é aproximadamente duas vezes maior que a da ferrita, o que, como já foi observado, permite
gravar em mídias com alta coercividade, usadas em unidades de alta capacidade. Neste aspecto, as cabeças de dupla face são melhores do que as cabeças de uma só face. Devido às suas vantagens inegáveis, há algum tempo os cabeçotes com metal na folga substituíram completamente os cabeçotes de ferrite tradicionais em acionamentos de alta qualidade. Mas os requisitos de capacidade cada vez maiores Discos rígidos levaram ao facto de estarem agora gradualmente a ser substituídos por cabeças de película fina.
As cabeças Thin Film TF são produzidas usando tecnologia semelhante à produção de circuitos integrados, ou seja, por fotolitografia. Vários milhares de cabeçotes podem ser “impressos” em um substrato de uma só vez, resultando em cabeçotes pequenos e leves. A lacuna de trabalho nas cabeças de filme fino pode ser muito estreita e sua largura é ajustada durante o processo de produção através da construção de camadas adicionais de liga de alumínio não magnética. O alumínio preenche completamente a lacuna de trabalho e protege-a bem contra danos (lascas nas bordas) quando contatos aleatórios com disco. O próprio núcleo é feito de uma liga de ferro e níquel, cuja indução de saturação é 24 vezes maior que a da ferrita.
As áreas de magnetização residual na superfície do disco formadas por cabeças de filme fino possuem limites claramente definidos, o que permite atingir densidades de gravação muito altas. Devido ao peso leve e ao pequeno tamanho dos cabeçotes, a folga entre eles e as superfícies do disco pode ser significativamente reduzida em comparação com os cabeçotes de ferrite e MIG: em alguns drives seu valor não ultrapassa 0,05 mícron. Como resultado, em primeiro lugar, a magnetização residual de áreas da superfície da portadora aumenta e, em segundo lugar, a amplitude do sinal aumenta e a relação sinal-ruído no modo de leitura melhora, o que em última análise afeta a confiabilidade do registro e leitura de dados .
Com a densidade das trilhas e o posicionamento dos dados ao longo da trilha, típico dos drives modernos, o sinal de reprodução de um cabeçote de ferrite convencional seria simplesmente “perdido” em ruído e interferência. Finalmente, graças à pequena altura das cabeças de película fina, é possível instalar grande quantidade discos.
Até recentemente, as cabeças de película fina eram significativamente mais caras do que outras, mas as melhorias na tecnologia de produção e o aumento dos requisitos de capacidade de armazenamento levaram, por um lado, a uma redução no custo das cabeças de película fina (tornou-se comparável e por vezes inferior superior ao preço das cabeças de ferrite e das cabeças com metal no intervalo) e, por outro lado, à sua distribuição mais ampla.
Atualmente, cabeçotes de filme fino são utilizados na maioria dos drives de alta capacidade, principalmente em modelos de pequeno porte, tendo praticamente substituído os cabeçotes por metal no vão. Seu design e características estão em constante melhoria, mas provavelmente serão substituídos por cabeçotes magnetorresistivos em um futuro próximo.
As cabeças de RM magneto-resistivas apareceram há relativamente pouco tempo. Eles foram desenvolvidos pela IBM e permitem atingir as mais altas densidades de gravação e desempenho do drive. As cabeças magnetorresistivas foram instaladas pela primeira vez no disco rígido de 1 GB (3,5") da IBM em 1991.
Todas as cabeças são detectores, ou seja, registrar mudanças nas zonas de magnetização e convertê-las em sinais elétricos que podem ser interpretados como dados. No entanto, há um problema com a gravação magnética: quando os domínios magnéticos da mídia são reduzidos, o nível do sinal principal diminui e existe a possibilidade de confundir o ruído com um sinal “real”. Para resolver este problema, é necessário ter um cabeçote de leitura eficaz que possa determinar de forma mais confiável a presença de um sinal.
Há muito tempo, foi descoberto outro efeito do magnetismo: quando um condutor é exposto a um campo magnético externo, sua resistência muda. Quando um cabeçote convencional passa pela zona de mudança de sinal, um pulso de tensão é formado nas saídas do enrolamento. A situação é diferente ao ler dados usando uma cabeça magnetorresistiva. Sua resistência acaba sendo diferente ao passar por áreas com diferentes valores de magnetização residual (permanente). Esse fenômeno serviu de base para a criação pela IBM de um novo tipo de cabeçotes de leitura. Uma pequena corrente de medição constante flui através da cabeça e, à medida que a resistência muda, a queda de tensão através dela também muda.
Como apenas um dispositivo de leitura pode ser construído com base no efeito magnetorresistivo, a cabeça magnetorresistiva consiste, na verdade, em duas cabeças combinadas em um único design. Neste caso, a parte de gravação é uma cabeça indutiva convencional e a parte de leitura é magnetorresistiva. Como as funções de leitura e gravação são divididas entre dois nós separados, cada nó pode ser projetado para a melhor maneira realizar a operação pretendida. A amplitude do sinal de saída de tal cabeçote é aproximadamente quatro vezes maior que a de um cabeçote indutivo.
As cabeças magnetorresistivas são mais caras e complexas do que outros tipos de cabeças, pois seu design contém elementos adicionais, e processo tecnológico inclui várias etapas adicionais. A seguir estão as principais diferenças entre as cabeças magnetorresistivas e as convencionais:
Em todos os cabeçotes discutidos anteriormente, a mesma lacuna “funcionou” durante o processo de escrita e leitura, e no cabeçote magnetorresistivo existem dois deles, cada um para seu funcionamento. Ao projetar cabeçotes com uma única folga de trabalho, você deve fazer concessões ao escolher sua largura. O fato é que para melhorar os parâmetros do cabeçote no modo leitura é necessário reduzir a largura do gap (para aumentar a resolução), e na hora de escrever o gap deve ser maior, pois neste caso o fluxo magnético penetra em a camada de trabalho a uma maior profundidade (“magnetizando-a” em toda a espessura). Em cabeçotes magnetorresistivos com dois intervalos, cada intervalo pode ter uma largura ideal. Outra característica dos cabeçotes em consideração é que sua parte de gravação (filme fino) forma trilhas mais largas no disco do que o necessário para o funcionamento da unidade de leitura (magnetoresistiva). Neste caso, a cabeça de leitura “coleta” menos interferência magnética de trilhas adjacentes.
Um esquema de uma cabeça magnetorresistiva típica da IBM é mostrado na Fig. 7. Todo o conjunto do cabeçote é mostrado aqui junto com o controle deslizante. O elemento de leitura da cabeça (sensor magnetoresistivo) consiste em um filme de ferro-níquel separado da camada magnética por uma pequena lacuna. Este filme muda sua resistência dependendo do campo magnético. Camadas protetoras protegem o sensor do elemento de leitura de campos magnéticos “aleatórios”. Na maioria dos projetos, a segunda proteção atua como elemento de gravação. Este tipo de cabeça é chamada de cabeça magnetorresistiva integrada. O elemento de gravação é uma cabeça indutiva convencional de película fina.
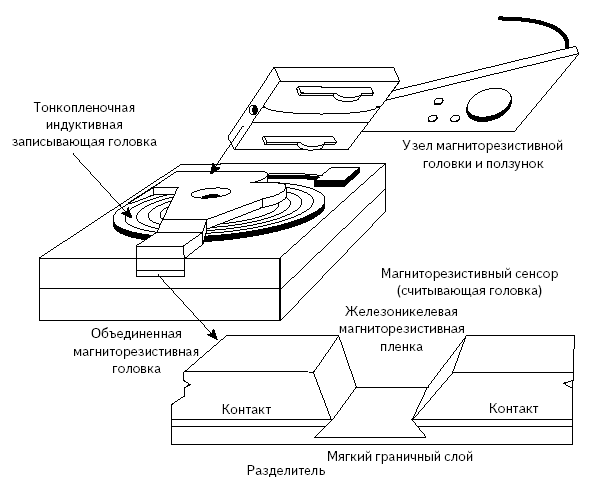
Arroz. 7 . Seção transversal da cabeça magnetorresistiva
Em 1997, a IBM anunciou um novo tipo de cabeçote magnetorresistivo muito mais sensível. Eles foram chamados de cabeças magnetorresistivas gigantes (Giant Magnetorresistive GMR). Eles receberam esse nome com base no efeito usado (embora fossem menores em tamanho que as cabeças magnetorresistivas padrão). O elemento de leitura da cabeça magnetorresistiva gigante é mostrado na Fig. 8 . Atualmente, a maioria das unidades de disco rígido utiliza esse tipo de cabeçote e, em um futuro próximo, a tecnologia GMR dominará a produção de cabeçotes.

Arroz. 8 . Seção transversal de uma cabeça magnetorresistiva gigante
Um controle deslizante é uma peça estrutural devido à qual a cabeça é apoiada em posição suspensa sobre distância necessária da superfície do disco. O controle deslizante em si também não entra em contato com a superfície da mídia. Na maioria dos casos, esta parte tem a forma de um catamarã com duas “bóias” laterais e uma “casa do leme” central com cabeça magnética (Fig. 9).
A tendência de redução constante do tamanho dos drives faz com que todos os seus componentes, inclusive os controles deslizantes, também sejam menores. Por exemplo, o tamanho de um mini disco rígido padrão é 0,160 x 0,126 x 0,034 polegadas (4 x 3,2 x 0,86 mm). A maioria das unidades de alta capacidade e tamanho pequeno agora usa controles deslizantes menores (50% menores): 0,08 x 0,063 x 0,017 polegadas (2 x 1,6 x 0,43mm). EM os modelos mais recentes Os tamanhos dos controles deslizantes são reduzidos em 70%. A redução do tamanho do controle deslizante leva a uma diminuição na massa do sistema móvel, composto pelo cabeçote, o controle deslizante e a alavanca móvel do cabeçote. Isso, por sua vez, permite que eles sejam movidos com altas acelerações, ou seja, reduzir o tempo de transição de uma faixa para outra e, em última análise, o tempo de acesso aos dados. Além disso, é possível reduzir o tamanho da área de “estacionamento” (“pista de pouso”) do cabeçote e, consequentemente, aumentar a área útil dos discos. Finalmente, devido à menor área de superfície de contato do controle deslizante, o desgaste inevitável da superfície da mídia durante o processo de desenrolamento e parada dos discos é reduzido.
Nos designs mais recentes de controles deslizantes, seu lado inferior recebe um formato especial, graças ao qual a altura do “vôo” das cabeças acima da superfície do disco (a quantidade de folga de ar) é mantida aproximadamente a mesma ao trabalhar em cilindros externos e internos. Ao usar controles deslizantes convencionais, a folga entre a cabeça e a camada de trabalho do disco muda significativamente ao passar das trilhas externas para as internas e vice-versa. Isso se deve às diferenças nas velocidades lineares das diferentes partes da superfície do disco em relação às cabeças (a velocidade linear depende do raio de rotação). Quanto maior a velocidade, maior será a folga. Este efeito é extremamente indesejável, principalmente em novos drives com gravação por zona, nos quais as densidades de gravação linear (ao longo das trilhas) são as mesmas em todos os cilindros. Neste caso, para leitura e escrita normais, o entreferro entre a cabeça e a camada de trabalho do disco deve permanecer constante. Este problema pode ser resolvido dando às superfícies dos controles deslizantes um formato especial, que é o que se faz nos drives com gravação de zona.
Nos discos rígidos, cada lado de cada unidade possui seu próprio cabeçote de leitura/gravação. Todas as cabeças são montadas em uma estrutura móvel comum e se movem simultaneamente. Cada cabeça é montada na extremidade de uma alavanca montada em uma mola que a pressiona suavemente contra o disco. Que. O disco parece estar imprensado entre um par de cabeças (superior e inferior). Na Fig. A Figura 10 mostra um projeto padrão de atuador de bobina móvel.

Arroz. 10. Cabeças de leitura/gravação e acionamento rotativo da bobina móvel
Quando o drive é desligado, os cabeçotes tocam os discos sob a ação de molas. Quando os discos giram, a pressão aerodinâmica sob as cabeças aumenta e eles saem das superfícies de trabalho (“voam para cima”). Quando o disco gira a toda velocidade, a distância entre ele e as cabeças pode ser de 0,55 micropolegadas (0,010,5 µm) ou até mais. É por estes motivos que a montagem das unidades HDA é realizada apenas em salas limpas que atendem aos requisitos da classe 100 (ou superior). Isso significa que em um pé cúbico de ar não pode haver mais do que 100 partículas de poeira de até 0,5 mícron de tamanho. (Para efeito de comparação: uma pessoa parada exala cerca de 500 dessas partículas a cada minuto). Portanto, as instalações estão equipadas com sistemas especiais de filtragem e purificação do ar. As unidades HDA só podem ser abertas nestas condições. Manter essas condições estéreis custa muito dinheiro.
Existem outras maneiras de criar condições estéreis. Por exemplo, uma mesa de montagem é isolada do espaço circundante por uma cortina de ar e o ar purificado é constantemente fornecido diretamente ao local de trabalho sob pressão.
Uma parte importante do acionamento é também o mecanismo que os coloca na posição desejada e é denominadomovimentação da cabeça. É com a ajuda dele que os cabeçotes se movem do centro para as bordas do disco e são instalados em um determinado cilindro. Existem muitos designs de mecanismos de acionamento, mas eles podem ser divididos em dois tipos principais:
O tipo de unidade determina em grande parte a velocidade e a confiabilidade da unidade, a confiabilidade da leitura de dados, sua estabilidade de temperatura e a sensibilidade à escolha da posição operacional e às vibrações. Os acionamentos acionados por motores de passo são muito menos confiáveis do que os acionados por bobinas móveis. A unidade é a parte mais importante da unidade. Na tabela ____ dois tipos de unidades de disco rígido são mostrados e a dependência das características do dispositivo em um tipo específico de unidade é mostrada.
Mesa. Dependência das características do drive no tipo de drive
|
Característica |
Acionamento por motor de passo |
Acionamento da bobina móvel |
|
Tempo de acesso aos dados |
Grande |
Pequeno |
|
Estabilidade de temperatura |
Baixo (muito!) |
Alto |
|
Sensibilidade à escolha do trabalhador disposições |
Constante |
Ausente |
|
Cumprido (nem sempre) |
Realizado |
|
|
Manutenção preventiva |
Reformatação periódica |
Não requerido |
|
Confiabilidade geral (relativa) |
Baixo |
Alto |
Portanto, drives com acionamento baseado em motor de passo têm uma velocidade média de acesso a dados bastante baixa (ou seja, um longo tempo de acesso), são sensíveis às flutuações de temperatura e à escolha da posição de operação durante as operações de leitura e gravação, e não estacionar automaticamente as cabeças (ou seja, movê-las para uma “pista de pouso” segura quando a energia for desligada). Além disso, eles geralmente precisam ser reformatados uma ou duas vezes por ano para alinhar a localização real das zonas de gravação com o layout dos cabeçalhos dos setores. É bastante óbvio que os acionamentos acionados por motores de passo são inferiores em todos os aspectos aos dispositivos que utilizam acionamentos de bobina móvel.
As unidades de disquete usam um motor de passo para mover as cabeças. Seus parâmetros (incluindo precisão) são suficientes para unidades desse tipo, já que a densidade de gravação de trilhas em disquetes é muito menor (135 trilhas por polegada) do que em discos rígidos (mais de 5.000 trilhas por polegada).
Motor de passoeste é um motor elétrico cujo rotor só pode girar em etapas, ou seja, em um ângulo estritamente definido. Se você girar o eixo manualmente, poderá ouvir cliques suaves (ou estalidos ao girar rapidamente) que ocorrem toda vez que o rotor passa por outra posição fixa. Os motores de passo só podem ser instalados em posições fixas. As dimensões desses motores são pequenas (da ordem de alguns centímetros), e o formato pode ser diferente - retangular, cilíndrico, etc. O motor de passo é montado fora da unidade HDA, mas seu eixo passa por dentro através de um orifício com uma junta de vedação. Normalmente o motor está localizado em um dos cantos da carcaça do inversor e pode ser facilmente reconhecido.
Um dos problemas mais graves inerentes aos mecanismos com motores de passo é a instabilidade das suas temperaturas. Quando aquecidos e resfriados, os discos se expandem e contraem, fazendo com que os trilhos se movam em relação às suas posições anteriores. Como o mecanismo de acionamento do cabeçote não permite movê-los por uma distância inferior a um passo (movimento em uma pista), é impossível compensar esses erros de temperatura. As cabeças se movem de acordo com o número de pulsos fornecidos ao motor de passo.
Na Fig. A Figura 11 mostra a aparência de um inversor com motor de passo.
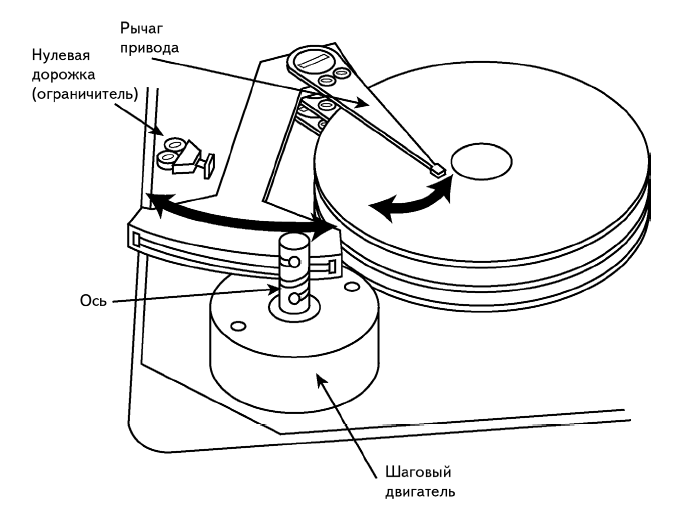
Arroz. onze. Aparência acionamento de motor de passo
Acionamento da bobina móvelusado em quase todas as unidades modernas. Ao contrário dos sistemas de motor de passo, que movem as cabeças às cegas, um acionamento de bobina móvel usa um sinal de feedback para determinar com precisão as posições das cabeças em relação aos trilhos e ajustá-las, se necessário. Este sistema permite maior velocidade, precisão e confiabilidade do que um acionamento de motor de passo tradicional. Um acionamento de bobina móvel opera com base no princípio do eletromagnetismo (seu design se assemelha a um alto-falante convencional no qual uma bobina móvel conectada a um cone pode se mover na lacuna de um ímã permanente). Em um projeto de acionamento típico, a bobina móvel é rigidamente conectada ao conjunto da cabeça e colocada no campo de um ímã permanente. A bobina e o ímã não estão conectados de forma alguma; a bobina se move apenas sob a influência de forças eletromagnéticas. Quando uma corrente elétrica aparece na bobina, assim como em um alto-falante, ela se move em relação ao ímã permanente rigidamente fixado, movendo o bloco da cabeça. Esse mecanismo acaba sendo muito rápido e não tão barulhento quanto um acionamento com motor de passo.
Ao contrário de um motor de passo, os dispositivos de bobina móvel não possuem posições predefinidas. Em vez disso, eles usam um sistema especial de orientação (posicionamento) que guia com precisão os cabeçotes para o cilindro desejado (para que o acionamento da bobina móvel possa mover suavemente os cabeçotes para qualquer posição). Este sistema é chamado de servoacionamento e difere do discutido anteriormente porque para orientação precisa (posicionamento) dos cabeçotes, é utilizado um sinal de feedback, que carrega informações sobre a posição relativa real dos trilhos e cabeçotes. Este sistema é frequentemente chamado de sistema de circuito fechado (ou autoajustável).
As flutuações de temperatura não afetam a precisão do acionamento e do feedback da bobina móvel. À medida que os discos encolhem e expandem, todas as alterações em seus tamanhos são monitoradas pelo servo acionamento, e as posições dos cabeçotes (não sendo predeterminadas) são ajustadas de acordo. Para buscar uma determinada trilha, são utilizadas informações auxiliares (código servo) pré-gravadas no disco, e durante a operação é sempre determinada a posição real do cilindro no disco, levando em consideração todos os desvios de temperatura. Como o código do servo é lido continuamente, durante o processo de aquecimento do drive e expansão dos discos, por exemplo, os cabeçotes rastreiam a trilha e não há problemas com a leitura dos dados. Portanto, um acionamento de bobina móvel com feedback é frequentemente chamado de sistema de rastreamento de trilha.
Os mecanismos de acionamento da bobina móvel vêm em dois tipos, diferindo apenas na disposição física dos ímãs e das bobinas:
Atuador linear (Fig. 12) move as cabeças em linha reta, estritamente ao longo da linha do raio do disco. As bobinas estão localizadas nas lacunas dos ímãs permanentes.
![]()
Arroz. 12. Atuador linear de bobina móvel
A principal vantagem de um acionamento linear é que seu uso não causa erros azimutais característicos de um acionamento rotativo. (Sob azimute refere-se ao ângulo entre o plano da folga de trabalho do cabeçote e a direção da trilha de gravação.) Ao passar de um cilindro para outro, os cabeçotes não giram e seu azimute não muda.
No entanto, o acionamento linear tem uma desvantagem significativa: seu design é muito grande. Para melhorar o desempenho do acionamento, é necessário reduzir o peso do mecanismo de acionamento e dos próprios cabeçotes. Quanto mais leve o mecanismo, maisÓ Com maior aceleração pode passar de um cilindro para outro. Os acionamentos lineares são muito mais pesados que os acionamentos rotativos, por isso não são usados em acionamentos modernos.
Acionamento rotativo(ver Fig. 10) funciona com o mesmo princípio do linear, mas nele as extremidades das alavancas da cabeça são fixadas à bobina móvel. À medida que a bobina se move em relação ao ímã permanente, as alavancas de movimento da cabeça giram, movendo as cabeças em direção ao eixo ou em direção às bordas dos discos. Devido à sua baixa massa, tal projeto pode se mover com altas acelerações, o que pode reduzir significativamente o tempo de acesso aos dados. O movimento rápido das cabeças também é facilitado pelo fato de os braços das alavancas serem diferentes: aquele em que as cabeças estão montadas tem um o comprimento maior.
As desvantagens deste acionamento incluem o fato de que os cabeçotes giram ao passar dos cilindros externos para os internos e o ângulo entre o plano da folga magnética do cabeçote e a direção da pista muda. É por isso que a largura da área de trabalho do disco (a área onde as trilhas estão localizadas) é frequentemente limitada (de modo que os inevitáveis erros azimutais permaneçam dentro de limites aceitáveis). Hoje em dia, um acionamento rotativo é usado em quase todos os acionamentos de bobinas móveis.
Para controlar acionamentos de bobinas móveis, três métodos de construção de um circuito de feedback foram usados em momentos diferentes:
Eles diferem na implementação técnica, mas, em essência, são projetados para atingir o mesmo objetivo: garantir o ajuste constante da posição dos cabeçotes e sua orientação (posicionamento) no cilindro correspondente. As principais diferenças entre eles se resumem em quais áreas das superfícies do disco os códigos servo estão escritos.
Com todos os métodos de construção de um circuito de feedback, são necessárias informações especiais (servocódigos) para sua operação, que são gravadas no disco durante sua fabricação. Geralmente é escrito no chamado Código cinza . Neste sistema de codificação, ao passar de um número para o próximo ou anterior, apenas um dígito binário muda. Com essa abordagem, as informações são lidas e processadas muito mais rapidamente do que com a codificação binária convencional, e a localização da cabeça ocorre praticamente sem atraso. Os códigos servo são gravados no disco quando a unidade é montada e não mudam durante toda a sua vida útil.
Os servocódigos são gravados em um dispositivo especial no qual as cabeças são movidas sequencialmente para posições estritamente definidas, e nessas posições os códigos mencionados acima são gravados nos discos. Para instalar com precisão os cabeçotes em tais dispositivos, é usada uma mira a laser, e as distâncias são determinadas pelo método de interferência, ou seja, preciso para frações de uma onda de radiação laser. Como a movimentação dos cabeçotes em tal dispositivo é realizada mecanicamente (sem a participação do próprio acionamento do acionamento), todo o trabalho é realizado em sala limpa ou com a tampa da unidade HDA aberta, ou através de orifícios especiais, que são selados com fita de vedação após a conclusão da gravação dos códigos servo. Você pode encontrar esses furos com fita adesiva na unidade HDA, e a fita com certeza indicará que, se você rasgá-la, perderá o direito ao serviço de garantia.
Dispositivos para escrever códigos servo são caros e geralmente projetados para um modelo de drive específico. Algumas empresas que reparam unidades possuem esses dispositivos, ou seja, pode substituir os códigos servo se o inversor estiver danificado. Caso a empresa reparadora não possua dispositivo para gravação de códigos servo, o drive defeituoso é enviado ao fabricante. Durante operações normais de leitura e gravação, os códigos servo não podem ser excluídos. Isso não pode ser feito mesmo com formatação de baixo nível.
Como o acionamento da bobina móvel rastreia a posição real das trilhas, os erros de posicionamento que ocorrem ao longo do tempo nos acionamentos do motor de passo não estão presentes nesses dispositivos. Seu funcionamento também não é afetado pela expansão e contração dos discos que ocorre devido às oscilações de temperatura. Muitos acionadores de bobina móvel modernos realizam calibração de temperatura em intervalos regulares durante a operação. Este procedimento consiste no fato de que todos os cabeçotes são transferidos alternadamente de zero para algum outro cilindro. Neste caso, por meio do circuito integrado, é verificado o quanto a trilha especificada se deslocou em relação à sua posição na sessão de calibração anterior, e são calculadas as correções necessárias, que são inseridas na memória de acesso aleatório do próprio drive . Esta informação é posteriormente utilizada sempre que as cabeças são movimentadas, permitindo o seu posicionamento com a máxima precisão.
A maioria das unidades realiza calibração de temperatura a cada 5 minutos durante a primeira meia hora após ligar a energia e depois a cada 25 minutos. Alguns usuários acreditam que houve um erro na leitura dos dados, mas na verdade era hora da próxima calibração. Observe que este procedimento é realizado na maioria dos smart drives modernos (IDE e SCSI), o que permite que os cabeçotes sejam levados aos trilhos com a maior precisão possível.
No entanto, à medida que os programas multimédia se tornam mais difundidos, essas interrupções de armazenamento tornam-se um incómodo. O fato é que quando a calibração é realizada, todas as trocas de dados com o drive são interrompidas, por exemplo, a reprodução de fragmentos de áudio ou vídeo é suspensa. Portanto, as empresas que produzem tais unidades começaram a produzir modificações especiais de A/V (A/V Audio Visual), nas quais o início da próxima calibração de temperatura é adiado até o término da atual sessão de troca de dados.
A maioria dos novos modelos de dispositivos IDE e SCSI são deste tipo, ou seja, a reprodução de fragmentos de áudio e vídeo não é interrompida pelos procedimentos de calibração.
A propósito, sobre os procedimentos realizados pelos drives automaticamente: a maioria dos dispositivos que realizam calibração automática de temperatura também realizam varreduras de disco. O fato é que, embora os cabeçotes não toquem o meio, eles ficam tão próximos dele que o atrito do ar começa a afetar. Apesar de seu valor relativamente pequeno, ainda pode levar ao desgaste prematuro da superfície do disco se o cabeçote estiver constantemente (ou quase constantemente) localizado na mesma pista. Para evitar que isso aconteça, o procedimento a seguir é executado. Se a cabeça permanecer parada por muito tempo (ou seja, nenhuma operação de leitura ou gravação for executada), ela se moverá automaticamente para uma trilha selecionada aleatoriamente localizada mais próxima das bordas do disco, ou seja, para a área onde a velocidade linear do disco é máxima e, portanto, o entreferro entre sua superfície e a cabeça é maior. O atraso de tempo é escolhido para ser relativamente curto (normalmente 9 minutos). Se, após mover o cabeçote, o disco ficar novamente “ocioso” pelo mesmo tempo, o cabeçote se moverá para outra trilha, etc.
Cunha auxiliar
Este tipo de sistema de gravação de servocódigo foi usado nos primeiros acionamentos de bobinas móveis. Todas as informações necessárias para apontar (posicionar) os cabeçotes foram registradas em códigos Gray em um setor estreito (“cunha”) de cada cilindro imediatamente antes da marca indicadora. Uma marca de índice marca o início de cada faixa, ou seja, as informações auxiliares são registradas no intervalo de pré-índice localizado no final de cada faixa. Essa área é necessária para compensar a rotação irregular do disco e a velocidade do clock de gravação, e o controlador de disco geralmente não a acessa. Na Fig. 13 mostra um método para registrar servocódigos na cunha auxiliar.

Figura 13. Cunha auxiliar
Alguns controladores precisam ser informados que um drive com cunha auxiliar está conectado a ele. Como resultado, eles ajustam (encurtam) o comprimento dos setores para acomodar a área auxiliar da cunha. A desvantagem mais significativa de tal sistema de gravação é que a leitura ocorre apenas uma vez a cada revolução do disco. Isto significa que em muitos casos o disco deve girar várias vezes para determinar e corrigir com precisão a posição das cabeças. Esta lacuna era óbvia desde o início, por isso sistemas semelhantes nunca foram difundidos e agora não são mais usados.
Códigos integrados
Este método de implementação de feedback é uma versão melhorada do sistema com uma cunha auxiliar (Fig. 14). Neste caso, os códigos servo são escritos não apenas no início de cada cilindro, mas também antes do início de cada setor. Isso significa que os sinais de feedback são enviados ao circuito de acionamento várias vezes durante cada revolução do disco e os cabeçotes são instalados na posição desejada com muito mais rapidez. Outra vantagem (em comparação com um sistema com disco dedicado) é que
o fato de que os códigos servo são escritos em todas as trilhas, de modo que a posição de cada cabeçote pode ser ajustada (isso se aplica a casos em que discos individuais no drive são aquecidos ou resfriados de maneira diferente ou estão sujeitos a deformações individuais).
O método descrito para escrever códigos servo é usado na maioria dos drives modernos. Como em sistemas com cunha auxiliar, os códigos servo integrados são protegidos contra apagamento e quaisquer operações de gravação são bloqueadas se os cabeçotes estiverem sobre áreas com informações de serviço. Portanto, mesmo com formatação de baixo nível, é impossível excluir códigos servo.
Um sistema com códigos servo integrados funciona melhor do que uma cunha auxiliar porque as informações de serviço (códigos servo) são lidas várias vezes para cada revolução do disco. Mas é bastante óbvio que um sistema no qual o circuito de feedback funciona deveria ser ainda mais eficaz continuamente , ou seja Os códigos servo são lidos continuamente.

Arroz. 14. Códigos servo integrados
Sistemas com disco dedicado
Ao implementar este método Os servocódigos são escritos ao longo de toda a pista, em vez de apenas uma vez no início da pista ou no início de cada setor. Naturalmente, se você fizer isso com todas as trilhas da unidade, não sobrará espaço para dados. Portanto, um lado de um dos discos é alocado exclusivamente para gravação de códigos servo. Prazodisco especializadosignifica que um lado do disco é apenas para gravação informação oficial(códigos servo) e os dados não são armazenados aqui. Esta abordagem pode parecer um desperdício à primeira vista, mas deve-se levar em conta que os códigos servo não são mais escritos em nenhum dos lados dos discos restantes. Portanto as perdas totais espaço em disco acaba sendo aproximadamente o mesmo que quando se usa o sistema de código incorporado.
Ao montar unidades com um disco dedicado, um lado de um disco específico é removido do uso normal para operações de leitura/gravação; em vez disso, uma sequência de códigos servo é gravada nele, que é posteriormente usada para posicionar os cabeçotes com precisão. Além disso, a cabeça do servo que serve este lado do disco não pode ser mudada para o modo de gravação, ou seja, Os servocódigos, como em todos os sistemas discutidos acima, não podem ser apagados nem pela gravação normal de dados nem pela formatação de baixo nível. Na Fig. A Figura 15 mostra um diagrama de um drive com disco especializado para códigos servo. Na maioria das vezes, a cabeça superior ou uma das cabeças centrais é projetada para ler códigos servo.

Arroz. 15. Sistema com disco especializado
Quando o drive recebe um comando para mover os cabeçotes para um cilindro específico, o aparelho eletrônico usa os sinais recebidos pela cabeça do servo para determinar com precisão a posição de todas as outras cabeças. À medida que as cabeças se movem, os números das faixas são continuamente lidos na superfície de um disco especializado. Quando a trilha desejada estiver sob o cabeçote do servo, o inversor para. Depois disso, a posição das cabeças é ajustada e só então é emitido o sinal de habilitação de gravação. E embora apenas um cabeçote (o cabeçote do servo) seja usado para ler os códigos do servo, todos os outros são montados em uma estrutura rígida comum, portanto, se um cabeçote estiver localizado acima do cilindro desejado, todos os outros também estarão.
Uma característica distintiva de uma unidade com disco especializado é um número ímpar de cabeças. Quase todos os drives de alta capacidade utilizam o método descrito de gravação de códigos servo, graças ao qual são lidos constantemente, independentemente da posição dos cabeçotes. Isto permite máxima precisão de posicionamento da cabeça. Existem também drives que combinam os dois métodos de ajuste da posição dos cabeçotes: com códigos integrados e com disco especializado. No entanto, tais unidades são raras.
Estacionamento automático da cabeça
Quando a energia é desligada, as alavancas com cabeças são abaixadas sobre as superfícies dos discos. As unidades são capazes de suportar milhares de “decolagens” e “pousos” de cabeçotes, mas é desejável que ocorram em áreas especialmente designadas da superfície do disco nas quais os dados não são gravados. Durante essas decolagens e pousos, ocorre desgaste (abrasão) da camada de trabalho, à medida que “nuvens de poeira” voam sob as cabeças, consistindo de horas
materiais da camada de trabalho do transportador; se durante a decolagem ou pouso houver um choque no
unidade, a probabilidade de danos aos cabeçotes e discos aumentará significativamente.
Uma das vantagens de um acionamento de bobina móvel éestacionamento automático da cabeça. Quando a energia é ligada, as cabeças são posicionadas e mantidas em posição pela interação dos campos magnéticos da bobina móvel e do ímã permanente. Quando a energia é desligada, o campo que mantém os cabeçotes sobre um determinado cilindro desaparece, e eles começam a deslizar incontrolavelmente ao longo das superfícies dos discos que ainda não pararam, o que pode causar danos. Para evitar possíveis danos ao acionamento, a unidade principal rotativa é conectada à mola de retorno. Quando o computador é ligado, a interação magnética geralmente excede a elasticidade da mola. Mas quando a energia é desligada, os cabeçotes se movem sob a influência de uma mola para a zona de estacionamento antes que os discos parem.
Assim, para acionar o mecanismo de estacionamento do cabeçote nos acionamentos de bobina móvel, basta desligar o computador; nenhum programa especial é necessário para isso. No caso de uma falha repentina de energia, os cabeçotes são estacionados automaticamente.
Quase todos os discos rígidos usam dois filtros de ar: um filtro de recirculação e um filtro barométrico. Ao contrário dos filtros substituíveis que foram instalados em unidades mais antigas de máquinas grandes, eles estão localizados dentro da caixa e não podem ser substituídos durante toda a vida útil da unidade.
Nos drives antigos, o ar era constantemente bombeado de fora para dentro do aparelho e vice-versa através de um filtro que precisava ser trocado periodicamente. Nos dispositivos modernos esta ideia foi abandonada. O filtro de recirculação na unidade HDA tem como objetivo apenas limpar a “atmosfera” interna de pequenas partículas da camada do meio de trabalho, que, apesar de todas as medidas tomadas, ainda caem dos discos durante as decolagens e pousos dos cabeçotes (bem como de quaisquer outras pequenas partículas que possam penetrar no interior do HDA). Como as unidades dos computadores pessoais são seladas e não há bombeamento de ar externo para dentro delas, elas podem operar mesmo em condições de poluição atmosférica severa (Fig. 16).

Figura 16. Direção do fluxo de ar na caixa HDA
A unidade HDA não está completamente vedada. O ar externo entra no HDA através de um filtro barométrico, pois é necessário para equalizar a pressão dentro e fora da unidade. Precisamente porque discos rígidos não são dispositivos completamente selados, as empresas fabricantes indicam-lhes a faixa de altitudes acima do nível do mar em que permanecem operacionais (geralmente de 300 a +3.000 m). Em ar mais rarefeito, não há espaço suficiente entre os cabeçotes e as superfícies da mídia. O orifício de ventilação é necessário para equalizar a pressão externa e interna do dispositivo, e o filtro barométrico instalado neste orifício evita contaminação no interior do inversor. O filtro é capaz de remover partículas maiores que 0,3 mícron, o que atende aos padrões de limpeza da atmosfera dentro da unidade HDA. Alguns dispositivos utilizam filtros mais densos (mais finos) para capturar partículas ainda menores. Existem unidades completamente seladas, mas com ar sob pressão no interior, essas unidades podem operar em qualquer altura e até mesmo em condições extremas - suportam choques e grandes flutuações de temperatura. Essas unidades destinam-se a fins militares e industriais.
O filtro barométrico não impede a entrada de umidade na unidade HDA, portanto, após algum tempo, a umidade do ar dentro da unidade será a mesma que fora. Se a umidade começar a condensar dentro do HDA enquanto o computador estiver ligado, ocorrerão sérios problemas. As instruções de operação da maioria dos discos rígidos fornecem tabelas ou gráficos para aclimatá-los às mudanças nas condições ambientais (temperatura e umidade).
Mesa. Período de aclimatação de armazenamento
|
Temperatura inicial, °C |
Tempo de aclimatação, h |
|
4 |
13 |
|
1 |
15 |
|
7 |
16 |
|
12 |
17 |
|
18 |
18 |
|
23 |
|
|
29 |
22 |
|
34 e abaixo |
27 |
É especialmente importante cumprir estas condições ao transportar o tanque de armazenamento de um local frio para um ambiente quente, uma vez que em tal situação a condensação de umidade é quase inevitável. Esta circunstância deve, em primeiro lugar, ser tida em conta pelos proprietários de sistemas portáteis com Discos rígidos. Quanto mais fria a unidade, mais tempo ela deverá aquecer antes de ligar.
O motor que aciona os discos costuma ser chamado de fuso. O motor do fuso está sempre conectado ao eixo de rotação dos discos, não sendo utilizadas correias de transmissão ou engrenagens para isso. O motor deve ser silencioso: quaisquer vibrações são transmitidas aos discos e podem causar erros de leitura e gravação.
A rotação do motor deve ser estritamente definida. Normalmente varia de 7.200 a 10.000 a 15.000 rpm ou mais e é estabilizado por um circuito de controle de motor de malha fechada (autoajuste) para atingir a precisão desejada. Assim, o controle da rotação do motor é feito de forma automática, não sendo fornecidos nos acionamentos dispositivos que permitam que isso seja feito manualmente. As descrições de alguns programas de diagnóstico dizem que eles podem ser usados para medir a velocidade de rotação dos discos. Na verdade, a única coisa que podem fazer é estimar o seu valor possível com base nos intervalos de tempo entre os momentos em que os cabeçalhos do setor aparecem. É basicamente impossível medir a velocidade de rotação através do programa, para isso são necessários dispositivos especiais (testadores). As informações sobre a velocidade de rotação do disco não são transmitidas (e não devem ser transmitidas) através da interface controlador rígido disco. Anteriormente, poderia ser estimado lendo o suficiente um grande número de setores e medindo os intervalos de tempo em que as informações relevantes aparecem. Mas isso só fazia sentido quando todos os discos estavam divididos no mesmo número de setores (17), e sua velocidade nominal de rotação era de 3.600 rpm.
O uso da gravação por zona, o surgimento de drives com diferentes frequências nominais rotações, buffers integrados e memória cache tornam impossível calcular programaticamente a verdadeira velocidade de rotação dos discos.
Na maioria dos inversores, o motor do fuso está localizado na parte inferior, sob a unidade HDA. No entanto, em muitos dispositivos modernos, ele é construído dentro da unidade HDA e representa a parte central da unidade de mídia. Este design permite, sem alterar o tamanho vertical do drive, aumentar o número de placas de disco (pratos) no bloco (na “pilha”).
O motor do fuso consome uma quantidade bastante significativa de energia da fonte de alimentação de 12 volts. Aumenta mais 23 vezes em comparação com o valor estacionário ao fazer overclock (girar) os discos. Essa sobrecarga dura vários segundos após ligar o computador. Se o seu computador tiver vários drives instalados, para não sobrecarregar a fonte de alimentação, você pode tentar organizá-los para serem ligados um por um. A inicialização atrasada do motor do fuso é fornecida na maioria das unidades SCSI e IDE.
Montado na placa de controle Circuitos eletrônicos controlar o motor do fuso e o cabeçote, bem como trocar dados com o controlador (apresentados de forma pré-determinada). Nas unidades IDE, o controlador é instalado diretamente na unidade e, para SCSI, placas de expansão adicionais podem ser usadas.
Muitas vezes, o mau funcionamento ocorre não nos componentes mecânicos dos drives, mas nas placas de controle. À primeira vista, esta afirmação pode parecer estranha, pois é sabido que os componentes eletrônicos são mais confiáveis do que os mecânicos, mas o fato permanece. Portanto, muitos drives defeituosos podem ser reparados substituindo a placa de controle ou seu elemento, e não o dispositivo inteiro. Esse recurso é especialmente atraente porque você pode acessar novamente os dados armazenados na unidade.
Observação*. Para mais informações sobre o circuito de controle (placa), veja as palestras.
Muitos kits de disco rígido podem incluir molduras como componentes opcionais (Figura 17). Mas hoje, na maioria dos casos, o painel frontal faz parte do gabinete do computador, e não da unidade em si.

Arroz. 17 . Moldura HDD padrão
A maioria dos discos rígidos possui pelo menos dois tipos de conectores: um conector (ou conectores) de interface e um conector de alimentação (veja a Figura 18).

Arroz. 18 Conectando difícil Unidade ATA (IDE)
Através dos conectores de interface (ver Fig. 19, 20,21), dados e comandos são transmitidos para o drive e vice-versa. Muitos padrões de interface fornecem conexão 1 vários drives em um cabo (barramento). No entanto, a maioria dos dispositivos modernos que eu D E (ATA), SATA e SCSI são conectados usando um cabo.

Arroz. 19. Aparência do conector do cabo de interface ATA de 40 pinos
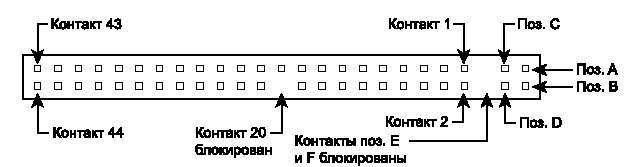
Arroz. 20. Diagrama de um conector unificado de 50 pinos usado para
conexão de unidades ATA de 2,5 polegadas (posições A, D, C, D para conexão de energia)

Arroz. 21, Aparência do loop tipo ATA (IDE) (cabo)
Os conectores de alimentação para discos rígidos são 2D -forma. O formato do conector funciona como uma chave e evita conexões incorretas. A maioria das unidades usa duas tensões de alimentação (5 e 12 V), mas modelos pequenos projetados para laptops requerem 5 V. Normalmente, uma fonte de 12 V alimenta o circuito de controle do motor do eixo e o cabeçote, e fornece 5 V para componentes eletrônicos. Os discos rígidos consomem mais energia do que as unidades de disquete. Portanto, ao conectar vários Disco rígido Você deve determinar a potência da fonte de alimentação.
O consumo de corrente de uma fonte de 12 V depende do tamanho do dispositivo: quanto mais pratos individuais estiverem incluídos no “pacote” e quanto maior o diâmetro de cada um deles, mais energia será necessária para acioná-los. Além disso, para obter maiores velocidades de rotação do disco, também é necessário aumentar a potência. Por exemplo, o consumo de energia para unidades de 3,5 polegadas é, em média, aproximadamente 24 vezes menor do que para unidades de 5,25 polegadas de tamanho normal. Algumas unidades em formatos particularmente pequenos (2,5 e 1,8 polegadas) consomem apenas cerca de 1 W de energia elétrica.
Às vezes, há um grampo de aterramento na caixa do inversor, que é necessário para garantir um contato confiável entre o fio comum do inversor e a caixa do sistema. Em computadores onde as unidades são fixadas diretamente no gabinete por meio de parafusos de metal, não é necessário um fio terra especial. Em alguns computadores, as unidades são montadas em guias de plástico ou fibra de vidro, que, obviamente, isolam eletricamente a caixa da unidade da caixa do sistema. Neste caso, devem ser conectados com um fio adicional conectado à referida pinça. Se o drive estiver mal aterrado, poderão ocorrer mau funcionamento no seu funcionamento, erros de leitura e escrita, etc.
Ao instalar uma unidade em um computador, geralmente é necessário reorganizar ou desconectar jumpers especiais (jumpers) e, às vezes, carregar resistores. Esses itens de configuração variam dependendo da interface e do fabricante do inversor.
Switches para configuração de disco duplo ATA (IDE)
A instalação de duas unidades IDE em um computador pode ser feita usando um ou dois cabos de interface. Os jumpers de configuração permitem determinar como os dispositivos estão conectados Controlador IDE.
No padrão IDE existe uma maneira de organizar colaboração dois discos rígidos conectados sequencialmente. O status do disco rígido (primário ou secundário) é determinado reorganizando o jumper identificado como Master para o primário e Slave para o secundário, ou aplicando o sinal de controle CSEL (Cable SELect cable selection) através de uma das linhas de interface. .
Quando apenas um disco rígido está instalado no sistema, seu controlador responde a todos os comandos vindos do computador. Se houver dois discos rígidos (e, portanto, dois controladores), os comandos serão enviados para ambos os controladores simultaneamente. Eles precisam ser configurados para que todos Disco rígido respondeu apenas aos comandos endereçados a ele. É precisamente para isso que servem o jumper (interruptor) Mestre/Escravo e o sinal de controle CSEL.
A maioria das unidades IDE pode ser configurada da seguinte forma:
Cada um dos controladores dos dois discos rígidos deve ser informado sobre seu status – primário ou secundário. A maioria das novas unidades usa apenas uma chave (primária/secundária) e algumas também usam uma chave de presença escrava.
Na Fig. A Figura 22 mostra a localização das chaves descritas na parte traseira da unidade.
Em algumas unidades modernas, os switches podem não estar instalados, ou seja, Por padrão, uma determinada configuração do drive é aceita. Todas as posições de chave necessárias para a operação adequada do inversor são fornecidas na documentação do inversor.
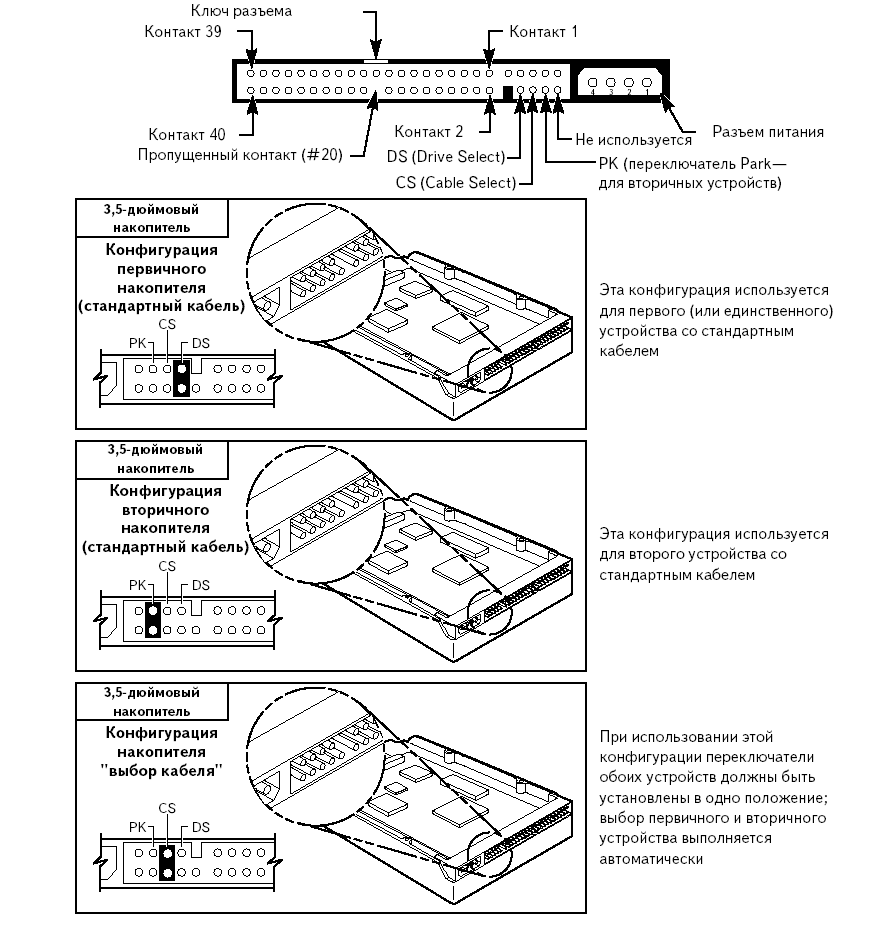
Arroz. 22. Chaves de unidade ATA (IDE) (jumpers)
1 A interface SCSI permite conectar até sete unidades a um cabo (Wide SCSI-2 suporta até 15 dispositivos). Os padrões ST-506/412 ou ESDI fornecem conectores separados para dados e sinais de controle
2 Eles podem ser iguais às unidades de disquete.
PÁGINA 16
Arroz. 1. Quando a corrente passa por um condutor, um campo magnético é formado ao seu redor
Bateria
Direção atual
Campos magnéticos
cercado por condutores
Arroz. 4. Trilhas e setores de um disco rígido
Arroz. 5. Cilindro do disco rígido
Bem como outros trabalhos que possam lhe interessar |
|||
| 46883. | Métodos diagnósticos para exame de pacientes com tuberculose pulmonar | 34,5 KB | |
| O diagnóstico (tuberculodiagnóstico) é um método de estudo da infecção pelo Mycobacterium tuberculosis, bem como da reatividade de pessoas infectadas ou vacinadas, baseado na utilização de testes tuberculínicos. | |||
| 46884. | TUBERCULOSE DE LINFONODOS INTRATORÁCEIS | 34,5 KB | |
| TUBERCULOSE DOS NÓDULOS LINFÁTICOS INTRATORÁCICOS A tuberculose dos gânglios linfáticos intratorácicos é geralmente dividida morfologicamente em uma forma infiltrativa semelhante à pneumonia hilar, caracterizada principalmente por reações perifocais ao redor dos gânglios afetados, e uma forma tumoral, semelhante às doenças tumorais e caracterizada principalmente por hiperplasia dos gânglios linfáticos linfonodos e caseose. Com um serviço pediátrico funcionando bem, a tuberculose dos gânglios linfáticos intratorácicos é detectada com mais frequência no exame de uma criança ou adolescente... | |||
| 46886. | BASES TECNOLÓGICAS ARTIFICIAIS | 34,99KB | |
| A categoria de bases tecnológicas artificiais também inclui aquelas bases tecnológicas que, para aumentar a precisão de colocação da peça no dispositivo, são pré-processadas com maior precisão do que a exigida para o produto acabado conforme desenho. bases tecnológicas artificiais são furos centrais que não são necessários para a peça acabada e são necessários apenas por razões tecnológicas. | |||
| 46887. | Características da filosofia do Renascimento. O homem como problema central da filosofia renascentista | 35 KB | |
| O humanismo é uma forma de pensar nesta época onde a ideia do bem humano é declarada o principal objetivo do desenvolvimento social e cultural. Dirigir-se a uma pessoa não é apenas uma análise de sua existência terrena, mas um indicador da essência de uma pessoa no mundo. O caminho da atividade criativa e da criatividade Não só a beleza espiritual de uma pessoa, mas também a sua beleza física adquire particular importância. O individualismo como atitude fundamental ao considerar uma pessoa torna-se um meio de justificar o seu valor próprio e a necessidade de libertação de... | |||
| 46888. | Método de projeto | 35 KB | |
| Para resolver de forma abrangente os problemas da educação tecnológica, são utilizados vários métodos, incluindo a implementação de projetos criativos, cujo objetivo é incluir os alunos no processo de atividade transformadora desde o desenvolvimento de uma ideia até à sua implementação. Ao concluir projetos, os alunos dominam métodos de atividade criativa inovadora, aprendem a encontrar e analisar informações de forma independente, obter e aplicar conhecimentos em diversas áreas, adquirir competências e habilidades trabalho prático experiência... | |||
| 46889. | Planejando um local com saldo “zero” de massas de terra | 35 KB | |
| A desintegração dos solos é feita através da preparação da base da estrutura e da alteração da topografia natural da área. O processo de desmonte do solo consiste em três operações principais: desmembramento do solo, movimentação, transporte e assentamento em áreas reforçadas. A desintegração pode ser feita pelo método de escavação e vazamento. Na hora da escavação, o transporte do solo até o local é de grande importância devido às importantes tarefas do tecnólogo, a seleção e desenvolvimento dos métodos mais eficazes de separação e... | |||
| 46890. | SUPERFÍCIES DE SUPORTE ADICIONAIS | 35,14KB | |
| Nesses casos, o tecnólogo é forçado a utilizar superfícies de apoio adicionais que carregam pontos de apoio adicionais, além dos seis teoricamente exigidos. Superfícies de apoio adicionais podem ser naturais. Um exemplo de uso de uma superfície de apoio adicional é girar um eixo longo. | |||
| 46891. | Política industrial estadual | 36,67KB | |
| Os tipos básicos de avaliação de ativos fixos são: valor inicial de reposição e valor residual. O custo inicial total dos ativos fixos de uma empresa é a soma dos custos reais a preços correntes para: aquisição ou criação de meios de trabalho: construção de edifícios e estruturas compra transporte instalação e instalação de máquinas e equipamentos, etc. custo, o ativo imobilizado é levado para o balanço da empresa e permanece inalterado durante toda a vida útil dos meios de trabalho e... | |||
Uma vez para um usuário simples O computador tinha que ser bem compreendido em sua estrutura, linguagens de programação e outras coisas não diretamente relacionadas às suas atividades imediatas. Simplesmente porque os primeiros computadores foram produzidos “nus” - sem qualquer Programas. Você quer trabalhar com um computador? Aprenda a falar a “língua” dele. Ou comunique-se através de um intermediário.
Mais tarde, a tecnologia informática desenvolveu-se de acordo com o mesmo cenário de todo o resto - a divisão do trabalho chegou a esta área. Em primeiro lugar, houve uma divisão entre os próprios usuários, que usavam não computadores como tais, mas pacotes de programas aplicativos especializados para resolver seus problemas, e programadores que escreveram esses mesmos programas. Estes últimos também foram rapidamente divididos em sistemas e aplicativos. Os primeiros ainda precisavam entender bem o hardware, pois seu trabalho era escrever sistemas operacionais e outras aplicações de “baixo nível”, em particular ambientes de desenvolvimento de software. E estes últimos deixaram de estar fortemente apegados aos equipamentos, utilizando a mão de obra dos primeiros. Sua tarefa era desenvolver programas aplicativos que atendessem às necessidades dos usuários.
Quando surgiram os primeiros computadores pessoais, todo esse sistema multinível já havia sido construído em sua forma geral. Mas também houve algumas peculiaridades. Em particular, a “camada” na forma do sistema operacional era muito fina - era impossível escrever programas aplicativos mais ou menos complexos sem acessar diretamente o hardware. E naquela época não existiam muitos programas aplicativos, e sua “complexidade” do ponto de vista atual era baixa, então às vezes o próprio usuário tinha que se tornar um programador e escrever o software necessário para si mesmo. No entanto, no início isto agradou bastante a muitas pessoas (um número considerável de computadores pessoais foram então comprados por verdadeiros entusiastas equipamento informático), mas deixou a sua marca na situação do mercado. Não é à toa que muitos manuais do usuário do MS DOS começaram com descrições de comandos do sistema e terminaram com exemplos de uso de interrupções não documentadas :)
Muita água já correu por baixo da ponte desde aqueles tempos despreocupados. Muitos usuários modernos nem conhecem todos os recursos dos aplicativos que usam constantemente. O que podemos dizer sobre o design do sistema operacional ou as características do equipamento oculto na unidade do sistema! Por um lado, isso é uma boa notícia - eles não sabem, porque não há necessidade de saber. As pessoas agora apenas jogam, assistem filmes, ouvem música, enviam mensagens de texto para amigos ao redor do mundo e imediatamente após comprar e instalar um computador em seu desktop, e não depois de terem estudado programação e arquitetura de computadores e escrito todos os programas necessários.
Por outro lado, tal situação conduz inevitavelmente a uma série de problemas assim que questões mais complexas do que o lançamento de uma aplicação começam a ser resolvidas. Em particular, os computadores ainda não são distribuídos gratuitamente. E diferentes modelos têm diferentes capacidades, desempenho e preços. E como fazer escolha certa para não se arrepender depois? Com chaleiras elétricas tudo é simples - apenas três parâmetros críticos: capacidade, potência e design. Além disso, todos os três são simples e compreensíveis na vida cotidiana. Este último pode ser avaliado visualmente; a capacidade indica quanto chá você pode preparar em uma operação e a potência informa quanto tempo levará. Com os computadores as coisas são ainda mais complicadas, felizmente sua funcionalidade é maior. Portanto a produtividade não é algo estritamente definido, ela é determinada pelas tarefas que estão sendo resolvidas. A estação de jogos ideal pode não ser melhor escolha para edição de vídeo e bom computador para processamento de vídeo é redundante para “tarefas de escritório”, etc. Portanto, muitas vezes é necessário avaliar não os computadores como um todo, mas seus componentes. Portanto, você precisa pelo menos saber quais;) É ainda melhor quando os princípios de sua operação são conhecidos - isso permite avaliar rapidamente, embora aproximadamente, os parâmetros de velocidade (e não apenas velocidade). Por exemplo, isso é verdade para discos rígidos: uma pessoa que entende seu design não fica surpresa com o fato de os modelos de laptop serem mais lentos e com menor capacidade do que os de desktop.
Em geral, conhecer a estrutura de um computador e os princípios de funcionamento de seus componentes ainda é, às vezes, útil. Infelizmente, a quantidade informações semelhantes no domínio público diminuiu nos últimos anos - há cerca de 20 anos, todo “guia para iniciantes” incluía descrições de como tudo funciona e funciona, mas hoje os autores geralmente acreditam que uma pessoa já sabe disso ou não está interessada nisso. De onde deve vir o conhecimento básico? A questão permanece em aberto. Portanto, tentaremos respondê-la. Pelo menos em relação a tal dispositivos importantes, como unidades de disco rígido. Por isso, hoje chamamos a sua atenção para um artigo da série “Como funciona?”, onde qualquer pessoa pode aprender como os discos rígidos são estruturados do ponto de vista físico e como isso afeta seu desempenho. Como o artigo é destinado a iniciantes, você não deve escrever cartas iradas posteriormente sobre o fato de que as informações são apresentadas superficialmente e uma série de nuances sutis não são levadas em consideração - tentaremos entendê-las com o tempo, mas por enquanto vamos desça até a fundação.
Não importa quão pesado e pesado possa ser o clericalismo da era dos anos 70, eles são muitas vezes mais claros e precisos do que termos emprestados mais simples. Na verdade: quanta informação a palavra “disco rígido” carrega? Perto de zero - a maioria dos usuários modernos nem sabe por que esse nome foi atribuído aos discos rígidos. Mas se você escrever “HDD”, poderá pensar muito imediatamente, simplesmente decifrando a abreviatura. Portanto, os heróis de hoje são as unidades de disco rígido magnético.
Tudo fica claro com a primeira palavra: o termo “drive” refere-se a quase todos os dispositivos de armazenamento de informações, se forem autossuficientes, ou este termo se refere a um drive (para mídia removível). Os discos rígidos e unidades flash USB pertencem à primeira categoria - incluem tanto o meio de armazenamento quanto toda a lógica para trabalhar com ele, ao contrário, por exemplo, discos ópticos probabilidades ou leitores de cartões, onde a mídia é removível, e esta é sua qualidade fundamental. Tudo parece ficar claro com a segunda palavra: também existem unidades de disquete - na linguagem comum, a mesma unidade de disco que agora se tornou uma raridade, mas que há 20-30 anos era muito importante, e até (em computadores pessoais) o apenas dados do dispositivo de armazenamento. Alguns princípios de armazenamento de dados em disquetes e discos rígidos são os mesmos, mas também existem diferenças fundamentais entre os dispositivos correspondentes, pelo que foi necessário ao mesmo tempo diferenciar estritamente entre essas unidades.
Agora sobre os discos. Essa forma de suporte de informação não foi adotada por acaso - um disco redondo é uma figura de rotação. Além disso, observo novamente que os discos não são a única opção possível: ao mesmo tempo, unidades de tambor magnético também eram usadas ativamente. Mas nunca vimos drives baseados em “quadrados magnéticos” ou triângulos (embora já estejam sendo trabalhados agora, mas seu princípio de funcionamento é completamente diferente dos drives convencionais) :) Falaremos sobre o porquê disso um pouco mais tarde. Por enquanto, vamos lembrar para o futuro que o fluido de trabalho nos discos rígidos são os discos. Normalmente nem um, mas vários, montados em um eixo e formando pacote de disco rígido.
Vários parâmetros físicos de baixo nível da unidade decorrem imediatamente disso: o diâmetro dos discos, seu número e velocidade de rotação angular. Os dois primeiros são limitados de cima pelos requisitos do formato da unidade, e o terceiro está fortemente ligado a eles. É tudo uma questão de presença de força de atrito, que é impossível de derrotar completamente. Assim, quanto mais discos houver na embalagem e/ou maior seu diâmetro, mais pesada será a embalagem, ou seja (em uma velocidade de rotação fixa), mais potência o motor elétrico deve ter, o que “acelera” toda essa estrutura para o modo de operação e o mantém nele. Esta é a primeira limitação, e bastante séria: a quantidade de energia é muitas vezes estritamente limitada. O segundo fator é que a complexidade de fabricar uma estrutura a partir de discos de grande diâmetro e rotação rápida aumenta exponencialmente à medida que o diâmetro e o número de discos aumentam. O fato é que no mundo real os discos não são perfeitamente finos e lisos, então você deve levar em consideração vários efeitos colaterais irritantes que acompanham a rotação. Como, por exemplo, o batimento das arestas no plano vertical, maior será o diâmetro do disco. É claro que o aprimoramento dos processos técnicos de fabricação de chapas permite reduzir o impacto desses fatores, mas isso acontece de forma bastante lenta.
Voltemos à abreviatura e lembremos que não temos apenas alguns discos abstratos girando, mas sim discos magnéticos, ou seja, possuem um revestimento com determinadas propriedades magnéticas. É graças a ele que os discos conseguem armazenar informações. No primeiro nível de abstração, podemos assumir que cada área microscópica de uma determinada área (mais sobre isso mais tarde) armazena exatamente um bit de dado. Assim, pode ser lido ou escrito.
O revestimento magnético também possui características próprias. Em primeiro lugar, esta é a sua área de aplicação, que é um pouco menor que todo o disco. O uso de áreas próximas às bordas costuma trazer consequências devido às peculiaridades da tecnologia de fabricação - não é possível aplicar o revestimento perfeitamente nessas áreas. O mesmo pode ser dito sobre o centro. Assim, toda a área de trabalho está delimitada entre dois números - o raio mínimo e máximo, o primeiro dos quais é estritamente maior que zero e o segundo é estritamente menor que o raio do próprio disco. E em segundo lugar o parâmetro mais importanteé a densidade de gravação, ou seja, o recíproco da área necessária para armazenar uma unidade de informação. Na prática, este valor não é muito utilizado, operando com os valores das densidades de gravação longitudinal e transversal, o que está associado à mecânica do próprio acionamento. Vamos estudar esse assunto com mais detalhes.
Apesar de quase toda a superfície do disco ser utilizada para armazenar informações, a qualquer momento podemos trabalhar apenas com uma pequena parte dela (caso contrário não haveria necessidade de cercar o jardim com rotação). Para ler ou gravar dados, é utilizada uma cabeça magnética (uma para cada lado utilizado dos discos da embalagem), voando acima da superfície do disco em baixa altitude. Assim, durante uma revolução do disco, toda uma trilha concêntrica passa por baixo dele e, para acessar áreas adjacentes, a cabeça deve ser movida para o centro ou na direção oposta. O conjunto de todas as trilhas localizadas a distâncias iguais do centro em unidades diferentes, aliás, é chamado de cilindro. Cada trilha tem largura diferente de zero, de modo que um número finito delas pode caber no disco. Quantos? Depende da largura da camada de trabalho (que, por sua vez, é determinada principalmente pelo diâmetro do disco) e da densidade de gravação lateral. Bem, ou vice-versa: a densidade de gravação lateral é um indicador de quantas trilhas podemos colocar em uma polegada no nível atual de tecnologia de produção de disco e cabeçote. Normalmente o segundo fator é decisivo - um aumento acentuado na densidade transversal está associado à introdução de novas tecnologias para a produção de cabeças magnéticas, permitindo-lhes operar com pistas de menor largura. Infelizmente, isso acontece muito raramente, mas aumenta imediatamente a capacidade dos discos.
A densidade de gravação longitudinal mostra quantos bits de informação podem ser contidos por polegada de circunferência, que é uma trilha, considerada uma abstração matemática. Esta característica também depende do nível de tecnologia de produção de discos e cabeçotes, mas está menos sujeita a mudanças abruptas, pois com a mesma tecnologia de produção de cabeçotes pode ser aumentada melhorando as características do revestimento magnético (seja mudando para uma nova tecnologia ou melhorando o atual). É verdade que, apesar de a densidade longitudinal ser medida em bits por polegada, na verdade eles não funcionam com bits individuais em discos - o valor é muito pequeno. E com bytes, geralmente também. A menos que em computadores muito antigos a capacidade de armazenamento fosse tão pequena que o processador fosse capaz de endereçar não apenas cada byte memória de acesso aleatório, mas cada byte estava em tambores magnéticos (os discos ainda não eram usados), então não era necessário um sistema de memória hierárquica - tudo poderia ser considerado operacional.
No entanto, quando surgiram os primeiros computadores pessoais, a capacidade das unidades de disco já se tinha tornado demasiado grande para endereçar cada byte directamente, pelo que finalmente se tornaram dispositivos com o chamado acesso em bloco: a unidade mínima de informação que pode ser lida ou gravado em um disco é um bloco ou setor. A propósito, seu tamanho típico para o IBM PC e seus sucessores é de 512 bytes. Embora outros valores fossem inicialmente aceitáveis, eles não se tornaram padrão, portanto a maioria dos softwares simplesmente não consegue trabalhar com setores diferentes do tamanho indicado acima. Só agora alguns fabricantes de discos rígidos começaram a utilizar setores ampliados em oito vezes (4K bytes, respectivamente), mas esse processo está apenas no estágio inicial.
Em qualquer caso, um grande número de setores deve caber na pista. Além disso, é altamente desejável que o número de setores nas vias adjacentes seja o mesmo. No caso dos disquetes ou dos primeiros discos rígidos, isso era verdade - acreditava-se que todas as trilhas continham o mesmo número de setores. Assim, a densidade real de gravação longitudinal aumentou muito rapidamente da periferia para o centro, juntamente com uma diminuição no comprimento das pistas. Além disso, seu valor máximo era limitado pela tecnologia, de modo que, de fato, a maior parte da área de vias externas era gasta de forma irracional. Porém, embora houvesse poucas trilhas (em disquetes, por exemplo, seu número é 40 ou 80), isso poderia ser tolerado, mas à medida que a densidade de gravação lateral aumentava, tais perdas tornaram-se cada vez mais significativas. Durante algum tempo nada pôde ser feito a respeito, uma vez que o software do sistema foi projetado para um número constante de setores por trilha, mas à medida que as interfaces do disco melhoraram e a maior parte da eletrônica foi transferida diretamente para o drive, a estrutura física real deste último foi escondido dos programas.
Os programas continuaram a assumir que o número de setores por trilha em um disco é um valor constante, mas na realidade permaneceu o mesmo apenas dentro de uma faixa limitada de várias dezenas de trilhas, mas havia várias dessas zonas. Claro que há uma certa perda de espaço em disco com este método, pois as densidades de gravação real e tecnológica devem coincidir nas trilhas internas de cada zona, e nas externas a primeira rapidamente se torna menor que a segunda, para que parte de as informações que poderiam ser fisicamente colocadas no disco simplesmente “não cabem”. No entanto, estas perdas são muito menores do que com apenas uma zona. Bem, em termos de complexidade de implementação, este método é apenas um pouco mais complicado do que o de “zona única” e muito mais simples do que a abordagem em que o número de sectores seria diferente em todas as vias.
Em geral, para que serve tudo isso? Além disso, devido à organização em blocos do espaço em disco do ponto de vista dos sistemas operacionais e outros softwares, a densidade teórica de gravação longitudinal (geralmente indicada para todo o disco rígido) é inatingível na prática. Mais precisamente, isso só é possível para várias faixas - internas em cada zona, e nas externas a densidade real de gravação é inferior à teórica. No entanto, graças à organização da zona, ela não difere muito, portanto, para nossos propósitos, podemos considerar a densidade de gravação longitudinal e transversal como características constantes do HDD. Mas depende muito pouco do fabricante - como veremos mais adiante, para todas as características de consumo do drive é desejável que a densidade de gravação (em ambas as direções) seja máxima. É por isso que a densidade de gravação só é lembrada quando, ao trocar as linhas de transmissão, o fabricante consegue aumentá-la. E baixá-lo artificialmente (em comparação com o que é tecnologicamente possível) é simplesmente não lucrativo. Então eles não subestimam.
Agora, tendo entendido mais ou menos as características de baixo nível dos discos rígidos, vamos subir para um nível superior - para aqueles parâmetros que nós, como usuários, precisamos na prática.
Vamos começar com o mais simples e, para muitos, o principal e quase o único parâmetro. Na verdade: ao começar a escolher um disco rígido, a maioria decide primeiro sobre sua capacidade e depois (se desejar) começa a escolher um modelo específico entre vários de volume igual. Além disso, é conveniente começar com este parâmetro porque é bastante simples :)
Na verdade, qual é a capacidade do HDD? O número de discos rígidos (mais precisamente, superfícies de trabalho - nem todo disco tem os dois lados usados devido às restrições de altura do disco, mas isso não é totalmente importante para nós agora), multiplicado pela capacidade de cada um deles. E a capacidade de uma superfície de trabalho (um lado do disco) é igual à sua área multiplicada pela densidade de gravação. A área de um círculo (novamente, lembramos que temos, sim, um anel, já que as áreas interna e externa não são usadas, mas seus tamanhos geralmente são constantes, então podemos simplificar a imagem para maior clareza) é proporcional a o quadrado do seu diâmetro. Assim, ao aumentar o diâmetro dos discos e o seu número na embalagem, mantendo a densidade de gravação, aumentamos muito rapidamente a capacidade do drive, e o diâmetro é mais importante: o número de discos dá apenas um aumento linear na capacidade, enquanto o diâmetro é quadrático. E com o mesmo número e diâmetro de discos, um efeito semelhante é alcançado aumentando a densidade de gravação. Em geral, para obter a capacidade máxima você precisa aumentar tudo, exceto a velocidade de rotação- Ela não tem a menor influência.
Por que colocamos essa característica em segundo lugar – acima da produtividade? A moda agora é pela eficiência energética. Primeiramente. Em segundo lugar, a favor agora e computadores portáteis, que já ultrapassaram os estacionários em volume de vendas, e aí a economia de energia não é um capricho, mas uma necessidade urgente - muitos estão prontos para uma hora extra vida útil da bateria sacrificar metade da produtividade.
Então, o que afeta o consumo de energia? Obviamente, a densidade de gravação não afeta isso. Mas todas as características mecânicas dos discos têm um efeito, e de forma negativa. Na verdade, quanto maior a velocidade de rotação, maior será o trabalho da força de atrito, portanto, os discos de baixa velocidade serão sempre mais econômicos que os de alta velocidade. Além disso, na mesma velocidade de rotação, quanto mais potente for o motor elétrico, mais pesado será o conjunto de discos. E este último é mais pesado (ceteris paribus) quanto mais discos contém e maior é o seu diâmetro. Assim, para máxima economia de energia é necessário reduzir o diâmetro dos discos, seu número e sua velocidade de rotação.
Observe que o que foi dito acima descreve, por assim dizer, um método extenso (ou seja, puramente quantitativo) de economia de energia. Além disso, há também um intensivo - o desenvolvimento de tecnologia. Por exemplo, se desenvolvermos um novo material para a produção de discos, que os tornará mais leves, então com o mesmo diâmetro e número de discos, a massa de toda a embalagem diminuirá e, portanto, a força de atrito e a potência consumida para superá-lo. Um efeito semelhante pode ser alcançado usando rolamentos aprimorados no sistema de suspensão de disco. Melhorias na tecnologia das cabeças magnéticas permitem que elas trabalhem com áreas menores de magnetização e operem com correntes mais baixas, o que também tem um efeito benéfico no consumo de energia. Em geral, existem muitas formas certamente úteis de combater o consumo excessivo de energia, que são utilizadas por todos os fabricantes. Mas muitas vezes acontece que todos os truques tecnológicos já foram aplicados, mas o nível de poupança alcançado ainda não é suficiente. Neste caso, não resta nada senão usar métodos extensivos.
E agora, finalmente, chegamos ao desempenho. Vamos começar com operações lineares, felizmente muitos ainda consideram a velocidade de cópia de arquivos uma medida do desempenho do disco rígido. No caso geral, isso é absolutamente errado, embora... se a principal e única tarefa do drive é servir de armazenamento para uma videoteca, então, de fato, as operações sequenciais são mais importantes: trabalhamos com arquivos grandes, e nós os lemos ou escrevemos exclusivamente sequencialmente, do começo ao fim.
Como calcular a velocidade máxima das operações lineares? É muito simples: quanto maior o número de bits de informação que passam pela cabeça magnética por unidade de tempo, maior será. Conseqüentemente, uma densidade de gravação consistente é muito importante - quanto maior for, maior será a velocidade. O segundo componente neste trabalho é a velocidade “física” usual de movimento do disco em relação à cabeça, diferente para cada pista, pois a uma velocidade angular constante de rotação do disco, a velocidade linear depende do raio da pista . É por isso que ocorre um efeito tão curioso que nas trilhas externas a velocidade de leitura e escrita sequencial é muito maior do que nas internas. Graças a isso, os discos produzidos em massa muitas vezes conseguem superar seus equivalentes de alto desempenho da mesma geração, com velocidades de rotação mais altas nas pistas externas. Mas discos de gerações diferentes quase sempre têm velocidades diferentes para realizar operações sequenciais, mesmo com os mesmos parâmetros físicos - a densidade de gravação varia significativamente.
Em geral, para resumir, para aumentar as velocidades lineares de leitura e gravação, os fabricantes é necessário aumentar a densidade de gravação, velocidade de rotação e diâmetro do disco(esta última não afetará de forma alguma as faixas internas, mas aumentará a velocidade das externas e, consequentemente, aumentará em média).
Quanto às operações com acesso aleatório aos discos, hoje mais relevantes (devido à multitarefa dos sistemas operacionais modernos), tudo é muito mais complicado do que com a lógica “direta” dos lineares. Para começar, vamos descobrir qual é exatamente o significado físico do tempo de acesso à informação, que determina a velocidade das operações aleatórias.
Então, precisamos de um bloco específico de dados (lembramos que é a menor unidade). Não podemos simplesmente pegar e pegar (o que é feito facilmente em mídia baseada em memória flash - ali, com base no número do bloco, o desejado é emitido imediatamente, onde quer que esteja, o que proporciona a esses drives um excelente tempo de acesso , pelo menos para operações de leitura) - primeiro você precisa mover o cabeçote para a trilha desejada e depois esperar que o setor desejado passe por baixo dela. A soma dos tempos de execução dessas operações nos dará o tempo de acesso.
Com o primeiro componente tudo é bastante simples: o tempo necessário para “acertar” a pista solicitada é diretamente proporcional ao diâmetro da placa. Era uma vez, também foi “estragado” pela densidade de gravação lateral, já que eram utilizados motores de passo que eram capazes de mover o cabeçote apenas uma trilha em uma operação, mas esses dias já se foram. Agora - apenas o diâmetro, e mesmo assim indiretamente: certo tempoÉ realmente necessário mover a cabeça e, na pior das hipóteses, ela terá que ser “conduzida” ao longo de todo o raio. Porém, quantas trilhas existem no disco não é muito importante: os circuitos internos, com base no número da trilha, determinam sua localização física aproximada e movem o cabeçote para onde for necessário (pelo menos eles tentam), para que após a primeira operação de posicionamento não mais do que uma dúzia está envolvida na seleção das faixas corretas, independentemente do número total no disco.
Ok, encontramos o caminho certo, agora só temos que esperar pelo setor certo. Quando? É difícil adivinhar - na melhor das hipóteses, receberemos o bloco de dados que precisamos imediatamente após o posicionamento; na pior das hipóteses, teremos que esperar uma revolução inteira do disco (se ele apenas “escorregar”). De acordo com as leis das estatísticas, segue-se que, em média, levaremos meia revolução do disco para esperar pelos dados necessários. Daí resulta inexoravelmente que quanto maior for a velocidade de rotação do disco, menor será o tempo de espera.
Uma vez que o setor esteja no lugar certo, ele precisa ser lido ou escrito, portanto, em teoria, todos os fatores importantes para operações sequenciais também afetam a velocidade total das operações aleatórias. No entanto, na verdade, eles podem ser completamente negligenciados - os blocos de dados são tão pequenos que lê-los fisicamente leva muito menos tempo do que posicionar a cabeça e esperar. Assim, para obter o tempo mínimo de acesso aos dados (e, portanto, o máximo desempenho em operações aleatórias) é necessário reduzir o diâmetro do disco e aumentar sua velocidade de rotação.
É fácil perceber que todos os requisitos para os parâmetros físicos dos discos rígidos são muito contraditórios - por exemplo, para aumentar a velocidade das operações sequenciais, o diâmetro do disco precisa ser aumentado, mas para um melhor comportamento em solicitações aleatórias, você precisa fazer exatamente o oposto. É por isso que os designers precisam constantemente fazer concessões, e as motivações para diferentes segmentos de mercado são completamente diferentes. Vamos ver quais. Para melhor fixação do material :)
Necessário: Alta capacidade com baixo custo.
Desejável: alto desempenho em operações lineares e aleatórias.
Indesejável: alto consumo de energia.
A combinação desses requisitos permite entender rapidamente por que todos os discos produzidos em massa de diferentes fabricantes são iguais. Com efeito, para obter capacidade máxima e alto desempenho em operações sequenciais, é necessário aumentar o diâmetro dos discos, por isso nesta classe é sempre máximo e é regulado não por características tecnológicas, mas por fatores de terceiros. Por exemplo, durante muitos anos (e mesmo agora) o diâmetro típico do prato para discos produzidos em massa era de 3,5 polegadas, mas a crescente popularidade dos laptops pode levar a um aumento significativo na participação de discos de 2,5 polegadas, uma reorientação da indústria em direção a eles e “definhando” os discos rígidos maiores (como aconteceu em sua época com os modelos de 5,25″). Embora os fabricantes resistam a isso com todas as suas forças, não é sem razão que às vezes até tentam ir contra a corrente com vários graus de sucesso. Basta lembrar a série Quantum Bigfoot: discos rígidos de cinco polegadas, que começaram a ser produzidos já na época do domínio total dos formatos menores. E daí? O grande diâmetro das placas ajudou-as a ter capacidade suficiente mesmo com um disco (o que simplificou bastante e reduziu o custo da mecânica) e uma boa velocidade de execução de operações sequenciais mesmo em baixas velocidades de rotação. Tudo foi arruinado apenas por operações aleatórias lentas, devido às quais os discos eram pouco adequados para uso em um computador no singular. Em geral, eles estavam à frente de seu tempo - agora, em tempos de uso massivo de videotecas em discos rígidos, muitos não recusariam um monstro de cinco polegadas com cerca de 10 terabytes (o que, com o nível atual de tecnologia, é bastante alcançável para tais modelos), que será utilizado apenas para armazenamento e reprodução de arquivos multimídia (ou seja, será o segundo no computador, ou mesmo se tornará a base para um VZD estacionário).
Por que os fabricantes não aumentam o número de discos nesses modelos? Na verdade, eles estão aumentando: há alguns anos era comum usar apenas duas placas, mas agora três ou quatro para modelos mais antigos das linhas é o padrão de fato. Mas não é possível acelerar muito esse processo, pois, em primeiro lugar, as dimensões externas são limitadas e, em segundo lugar, os discos rígidos multidisco exigem o uso de mecânicas mais complexas (e caras!). Pelas mesmas razões, a velocidade de tais unidades aumenta muito lentamente ao longo do tempo: são caras de fabricar e não são muito necessárias (não afeta a capacidade e é melhor aumentar a velocidade das operações sequenciais usando densidade de gravação). Em geral, por todos esses motivos, hoje a opção padrão para discos rígidos produzidos em massa passou a ser a seguinte: pratos com diâmetro de 3,5 polegadas, até quatro no total (cinco em alguns modelos do mesmo fabricante), girando a uma velocidade velocidade de 7200rpm.
Obrigatório: alta velocidade de operações aleatórias.
Desejável: alto desempenho em padrões lineares.
Vamos tentar subir de classe - para o nível de unidades para estações de trabalho e servidores. Não há necessidade de uma capacidade muito alta de um disco separado aqui - eles ainda são usados como parte de arrays. E dos dois tipos de desempenho, os modelos de acesso aleatório são significativamente mais importantes. É por isso que os fabricantes desses modelos quase sempre oferecem ao mercado modelos de alta velocidade (velocidade de rotação 10-15 mil rpm) em placas de diâmetro reduzido (2,5-2,8 polegadas). Como já escrevemos acima, isso leva ao fato de que em termos de velocidade de execução de operações sequenciais eles não são muito melhores que os representantes de séries produzidas em massa, e também estão muito atrás deles em termos de capacidade: as placas são pequenos e há menos deles (caso contrário, a complexidade aumenta muito a fabricação do drive e seu consumo de energia). Porém, ao mesmo tempo, os indicadores de velocidade mesmo em padrões sequenciais são “mais uniformes”, já que a velocidade nas pistas internas é maior, e o desempenho em operações aleatórias, é claro, é significativamente maior do que o de todas as outras famílias de hard. unidades.
Necessário: Alta capacidade com baixo custo e consumo de energia.
Recentemente, a direção de “discos rígidos ecológicos” tem se desenvolvido em ritmo acelerado. Isto se deve em grande parte ao fato de que a produtividade não é tão importante em diversas áreas. Especialmente para aplicações não informáticas - em um gravador doméstico, por exemplo, qualquer velocidade será excessiva, já que mesmo um fluxo HD é medido em dezenas de megabits, e até mesmo os discos rígidos mais antigos em operações sequenciais (não haverá aleatório aqueles em tal dispositivo) são capazes de dezenas de megabytes por segundo. Difícil externo Até recentemente, as unidades eram limitadas pelo desempenho da interface USB 2.0 mais comum, portanto, o disco rígido em si também não precisa de alta velocidade. E não é necessário usar discos com a mesma velocidade em um computador - se houver vários discos rígidos, então alguns deles, usados principalmente para armazenar grandes quantidades de dados, podem ser mais lentos que o “principal”, em qual o sistema operacional e os programas aplicativos estão instalados. Mas se a velocidade não for importante, então parâmetros como consumo de energia e ruído começam a ocupar o primeiro lugar, e você pode reduzi-los mantendo a capacidade simplesmente reduzindo a velocidade de rotação. Além disso, não se pode dizer que o desempenho desses modelos seja tão ruim - a densidade de gravação está em constante crescimento (sem isso não será possível aumentar o volume), então a velocidade das operações lineares costuma ser um pouco menor que a das operações em massa -modelos produzidos da mesma geração, mas superiores aos dispositivos mais antigos (as razões para isso são explicadas acima). Em geral, esta classe agora inclui discos rígidos com pratos de 3,5 polegadas, mas com velocidade de rotação menor do que os discos típicos (7.200 rpm). Quanto menor? Depende dos modelos. Normalmente entre 5.000 e 5.900 rpm, embora não ficaríamos surpresos se as rpm continuassem a cair ainda mais depois de um tempo.
Requerido: compacto, baixo consumo de energia.
Desejável: alta capacidade.
Às vezes, o consumo de unidades, mesmo da classe anterior, acaba sendo muito alto e, em algumas áreas, seu uso é simplesmente impossível - por exemplo, um disco rígido em placas de 3,5 polegadas simplesmente não cabe na maioria dos laptops. A solução é óbvia - é preciso reduzir o diâmetro das placas. Geralmente tem 2,5 polegadas, embora possa ser menor. Esses modelos diferem dos drives de alta velocidade por sua baixa velocidade de rotação - um máximo de 7.200 rpm e, mais frequentemente, 5.400 ou mesmo 4.200 rpm. Isto se deve não apenas aos requisitos de eficiência, mas também ao fato de que é desejável obter a máxima capacidade possível - desta forma a área do prato é aproveitada de forma mais completa do que nos modelos de alto desempenho, incluindo os “inconvenientes” internos e mais distante dos trilhos centrais. Mas esses discos rígidos funcionam lentamente por outro motivo - eles precisam usar uma mecânica de cabeça magnética mais compacta (e, portanto, de baixo desempenho). Tudo isso leva ao fato de que mesmo os modelos de laptop mais rápidos são mais lentos não apenas do que os discos rígidos de desktop produzidos em massa, mas também com baixo consumo de energia. Mesmo a uma velocidade de rotação mais elevada e apesar das placas mais pequenas, as cabeças têm de ser deslocadas numa distância mais curta, mas também se movem mais lentamente. Assim, um disco rígido móvel de última geração sempre terá velocidade inferior ao disco “verde” mais econômico. E em termos de capacidade, também perderá para a massa - devido às rígidas restrições ao consumo de energia, os discos com velocidades de rotação mais altas precisam usar menos placas. Mas esse mesmo nível de consumo de energia em ambos os casos é simplesmente inatingível para uma classe de discos rígidos menos portátil.
Em geral, como vemos, tudo é bastante simples e fácil de explicar. É verdade que leitores especialmente meticulosos provavelmente já terão uma pergunta na ponta da língua: por que então unidades de fabricantes diferentes (e até famílias diferentes do mesmo fabricante), mesmo com características de baixo nível aproximadamente iguais, muitas vezes diferem muito em desempenho ? A resposta mais simples, mas que na verdade não explica nada, é porque eles possuem uma eletrônica diferente. Quais são as diferenças e como elas afetam o desempenho e outras características - tudo isso será tema de artigos subsequentes.
Estudantes, estudantes de pós-graduação, jovens cientistas que utilizam a base de conhecimento em seus estudos e trabalhos ficarão muito gratos a você.
postado em http://www.allbest.ru/
Agência Federal de Educação
Instituição estadual de ensino de ensino profissional superior
"Universidade Técnica Estadual de Tver"
(GOUVPO "TSTU")
Trabalho do curso
de acordo com o curso Interfaces dispositivos periféricos
A.G. Nikíforov
Especialidade 230101 VMCSS
A maior parte das informações digitais é armazenada em discos rígidos de computadores. Este aparelhoé bastante complexo, pois contém seu próprio processador-controlador, memória, circuitos de controle mecânico e E/S. As unidades de disco rígido percorreram um longo caminho, desde unidades volumosas até dispositivos em miniatura. O número de informações colocadas nos meios de comunicação, ou de outra forma a sua capacidade, aumentou. Nas unidades de consumo mais populares, atingiu um terabyte.
A primeira unidade de disco rígido foi desenvolvida pela IBM no início dos anos 70. Esse disco de quatorze polegadas armazenava 30 MB de informações em cada lado, o que se reflete no nome “disco rígido”. A capacidade do disco 30/30 ecoa o nome da famosa espingarda Winchester. Esta unidade ainda é usada em alguns centros de informática como mesa de chá. O primeiro disco rígido serial – 3340 – foi criado pela IBM em 1973. Tinha capacidade de 140 MB e custava US$ 8.600. Esses discos rígidos foram projetados para uso em grandes computadores mainframe. 15 anos depois, a IBM adaptou discos rígidos para uso em computadores pessoais, mas o conceito básico e o princípio operacional permaneceram os mesmos do primeiro disco 30/30.
Os discos magnéticos rígidos são dispositivos de acesso direto - as informações estão disponíveis quase instantaneamente em qualquer parte do disco. Ao contrário da RAM, eles são usados para armazenamento permanente de informações.
O propósito disto trabalho do cursoé estudar o princípio de funcionamento de um disco rígido, sua estrutura, características básicas e formas de melhorar a qualidade de funcionamento dos dispositivos.
Todas as tarefas atribuídas durante o trabalho foram concluídas com sucesso.
1. Edisco rígido. Princípios da gravação magnética em um disco rígido
As unidades de disco rígido combinam a(s) mídia(s), o leitor/gravador e uma parte de interface chamada controlador de disco rígido em um único pacote. Um projeto típico de um disco rígido é um único dispositivo - uma câmara, dentro da qual há uma ou mais mídias de disco montadas em um eixo e um bloco de cabeçotes de leitura/gravação com seu mecanismo de acionamento comum (Figura 1). Próximo à mídia e à câmara do cabeçote existem circuitos de controle para os cabeçotes, discos e a parte de interface. A placa de interface do dispositivo contém a interface do dispositivo de disco e o controlador com sua interface está localizado no próprio dispositivo. Os circuitos de acionamento são conectados ao adaptador de interface por meio de um conjunto de cabos.
Figura 1. Design do disco rígido
As informações são registradas em trilhas concêntricas distribuídas uniformemente pela mídia. No caso de mais de um disco, o número de mídias, todas as trilhas localizadas uma abaixo da outra são chamadas de cilindro. As operações de leitura/gravação são realizadas sucessivamente em todas as pistas do cilindro, após o que as cabeças se movem para uma nova posição.
A câmara selada protege o meio não apenas da penetração de partículas mecânicas de poeira, mas também dos efeitos de campos eletromagnéticos. A câmara não está completamente selada porque... conecta-se à atmosfera circundante por meio de um filtro especial que equaliza a pressão dentro e fora da câmara. O ar dentro da câmara está tão livre de poeira quanto possível, porque As menores partículas podem causar danos ao revestimento magnético dos discos e perda de dados e desempenho do dispositivo.
Os discos giram constantemente em velocidades de rotação de mídia de 4.500 a 10.000 rpm, o que proporciona altas velocidades de leitura/gravação. Com base no diâmetro da mídia, os discos mais comumente produzidos são de 5,25, 3,14 e 2,3 polegadas.
Atualmente, os mais utilizados são motores de passo e lineares para mecanismos de posicionamento e mecanismos de movimentação de cabeça em geral.
Em sistemas com mecanismo de passo e motor, os cabeçotes se movem em uma determinada distância correspondente à distância entre os trilhos. A discrição dos passos depende das características do motor de passo ou é definida por servomarcas no disco, que podem ser de natureza magnética ou óptica.
Em sistemas com acionamento linear, os cabeçotes são movimentados por um eletroímã e, para determinar a posição desejada, são utilizados sinais de serviço especiais, gravados na mídia durante sua produção e lidos no posicionamento dos cabeçotes. Muitos dispositivos usam uma superfície inteira e um cabeçote especial ou sensor óptico para sinais servo.
Os atuadores lineares movem as cabeças muito mais rápido do que os atuadores de passo e também permitem pequenos movimentos radiais "dentro" da pista, permitindo que o centro do círculo da pista do servo seja rastreado. Isto alcança a melhor posição da cabeça para leitura de cada trilha, o que aumenta significativamente a confiabilidade dos dados lidos e elimina a necessidade de procedimentos de correção demorados. Como regra, todos os dispositivos atuadores lineares possuem um mecanismo automático para estacionar as cabeças de leitura/gravação quando a energia do dispositivo é desligada.
O princípio da gravação magnética de sinais elétricos em um meio magnético em movimento é baseado no fenômeno da magnetização residual de materiais magnéticos. O registro e o armazenamento de informações em um meio magnético são realizados convertendo sinais elétricos em mudanças correspondentes no campo magnético, influenciando-o no meio magnético e preservando por muito tempo vestígios dessas influências no material magnético, graças ao fenômeno de residual magnetismo. A reprodução dos sinais elétricos é realizada por conversão inversa. Um sistema de gravação magnética consiste em um meio de gravação e cabeças magnéticas interagindo com ele (Figura 2).
Figura 2. O princípio de gravação e leitura de informações de mídia magnética
Durante a gravação magnética digital, uma corrente é fornecida à cabeça magnética, na qual o campo de gravação muda sua direção para a direção oposta em determinados intervalos. Como resultado, sob a influência do campo disperso da cabeça magnética, ocorre a magnetização ou remagnetização de seções individuais do meio magnético em movimento.
Quando a direção do campo de gravação muda periodicamente na camada de trabalho do transportador, surge uma cadeia de seções com direção de magnetização oposta, que entram em contato entre si com os mesmos pólos. O tipo de registro considerado, quando trechos da camada de trabalho do suporte são remagnetizados ao longo de seu movimento, é denominado registro longitudinal (Figura 3).
Áreas alternadas com diferentes direções de magnetização que aparecem no revestimento magnético são domínios magnéticos (células de bits). Quanto menor o tamanho da célula, maior será a densidade de gravação de informações. Porém, à medida que o tamanho da célula diminui, aumenta a influência mútua de seus campos desmagnetizantes, direcionados na direção oposta à magnetização nas células, o que, quando a célula bit diminui abaixo de um valor crítico, leva à desmagnetização espontânea.
Figura 3. Sequência de áreas com sentido oposto de magnetização
Para gravação magnética, são utilizadas mídias na forma de placas magnéticas (discos). Os wafers são feitos depositando vários filmes de metal e uma camada de revestimento protetor em um substrato de vidro ou alumínio muito plano e sem defeitos. As informações são colocadas na forma de círculos concêntricos chamados trilhas (Figura 4). Em HDDs modernos, a densidade de trilhas atinge 4,3 x 104 trilhas por centímetro de raio do wafer.
Figura 4. Colocando trilhas na superfície do disco
A menor unidade de informação na qual o sistema de gerenciamento de disco rígido opera é chamada de setor. Em números esmagadores mídia moderna setor é de 512 bytes. O sistema de endereçamento de setor atualmente em uso é denominado LBA (Endereçamento de bloco lógico). Para discos de pequena capacidade ou para fins de retrocompatibilidade com equipamentos mais antigos, o sistema de endereçamento CHS pode ser utilizado. A abreviatura CHS significa Cilindro, Cabeçote, Setor - cilindro, cabeçote, setor. Pelo nome fica claro o significado desse tipo de endereçamento, pois está vinculado a partes do dispositivo de disco rígido. A vantagem do LBA sobre o CHS é que este último possui uma limitação no número máximo de setores endereçáveis, em termos quantitativos igual a 8,4 gigabytes; o LBA não possui essa limitação.
Primeiro setor difícil disco (ou melhor, zero) é chamado MBR (Master Boot Record) ou principal entrada de inicialização. No início deste setor há um código onde o sistema básico de entrada/saída do computador transfere o controle quando ele é inicializado. Posteriormente, esse código transfere o controle para o carregador do sistema operacional. Também no setor 0 existe uma tabela de partição do disco rígido. Uma seção representa uma gama específica de setores. Na tabela é inserido um registro sobre a partição, com o número do seu setor inicial e tamanho. Pode haver um total de quatro dessas entradas na tabela de partições.
A partição cuja entrada está na tabela de partições do setor zero é chamada primária. Devido às limitações mencionadas acima, pode haver no máximo quatro dessas partições em um disco. Alguns sistemas operacionais são instalados apenas em volumes primários. Se for necessário usar mais partições, uma entrada sobre a partição estendida será inserida na tabela. Este tipo de partição é um contêiner no qual são criadas partições lógicas. Pode haver um número ilimitado de volumes lógicos, porém, nos sistemas operacionais Windows, o número de volumes conectados simultaneamente é limitado pelo número de letras do alfabeto latino. Esses três tipos de partições têm o suporte mais amplo entre a grande maioria dos sistemas operacionais e são os mais difundidos. Na verdade, em casa, ou à escala dos computadores clientes das organizações, estes são os tipos de partições que se encontram. No entanto, os tipos de partição não estão limitados a estes três tipos. Há um grande número de partições especializadas, mas elas também usam volumes primários como contêineres.
Uma partição é um espaço designado em um disco para armazenar qualquer informação nele para organizar uma estrutura de armazenamento de dados que deve ser criada sistema de arquivo. Este processo é chamado de formatação de partição. Existem muitos tipos de sistemas de arquivos; os sistemas operacionais Windows usam FAT/NTFS; os sistemas operacionais baseados no kernel Linux usam Ext2/3FS, ReiserFS e Swap. Existem muitos utilitários para acesso multiplataforma a vários sistemas de arquivos de sistemas operacionais que inicialmente não os suportam. O Partition Manager 8.5 permite visualizar conteúdo e copiar dados desses sistemas de arquivos.
Alguns sistemas de arquivos, como FAT/NTFS, operam em estruturas de dados maiores no disco rígido, chamadas clusters. Um cluster pode incluir um número arbitrário de setores. A manipulação do tamanho do cluster traz benefícios adicionais ao desempenho do sistema de arquivos ou ao consumo de espaço livre.
E As informações nas superfícies do drive são armazenadas na forma de uma sequência de locais com magnetização variável, proporcionando um fluxo contínuo de dados quando lidos por meio de leitura sequencial. Todas as informações e seus locais de armazenamento são divididos em informações de serviço e de usuário. As informações do serviço e do usuário são armazenadas em áreas de pista chamadas setores. Cada setor contém uma área de dados do usuário - um local onde você pode escrever informações que ficam posteriormente disponíveis para leitura e uma área de dados servo que é escrita uma vez durante a formatação física e identifica exclusivamente o setor e seus parâmetros (seja usado ou não, o endereço físico do setor, código ECC e etc.). Todas as informações do servo não são acessíveis aos procedimentos normais de leitura/gravação e são completamente exclusivas dependendo do modelo e fabricante do inversor.
Ao contrário dos disquetes e discos rígidos antigos, os discos das unidades modernas passam por marcação primária ou de baixo nível (formatação de baixo nível) em um suporte tecnológico especial de fábrica de alta precisão. Durante esse processo, marcas de serviço - informações do servo - são gravadas nos discos e as trilhas e setores usuais são formados. Assim, se antes uma nova unidade precisava ser “formatada em baixo nível”, agora não é que não haja necessidade de fazer isso - é simplesmente impossível sem equipamento especial e sofisticado e vários “programas de formatação de baixo nível” mais muitas vezes simplesmente redefinem o conteúdo dos setores verificando sua legibilidade, embora às vezes possam danificar irreversivelmente a marcação de serviço e as informações servo dos setores de serviço.
Aparência vários métodos a codificação destes setores está associada, em primeiro lugar, às características técnicas dos dispositivos de armazenamento e transmissão de informação e ao desejo dos fabricantes de aproveitar ao máximo o espaço físico dos suportes de informação. Existem vários métodos diferentes de codificação de dados em uso hoje.
Modulação de frequência (FM) é um método usado em unidades de disco magnético removíveis. A codificação FM pode ser chamada de codificação de densidade unitária. O método envolve escrever um bit de sincronização na mídia no início de cada elemento de dados de bit. Um elemento de bit é definido como o intervalo de tempo mínimo entre bits de dados obtidos a uma velocidade de rotação constante do disco de mídia. O método garante uma mudança na direção do fluxo magnético por unidade de tempo de rotação. Este intervalo de tempo corresponde a uma densidade máxima de fluxo magnético longitudinal de 2.330 alterações por 1 cm e uma taxa de transmissão de dados de 125 Kbps. A simplicidade de codificação e decodificação usando o método FM é determinada pela taxa de repetição constante dos pulsos de clock. No entanto, a presença destes bits de sincronização é uma das desvantagens este método, porque o código resultante é ineficiente em termos de compactação de dados (metade do espaço da mídia é ocupado por bits de sincronização). Este é um dos primeiros métodos não usados atualmente em discos rígidos.
Modulação de frequência modificada (MFM) é um método FM aprimorado. A modificação consiste em reduzir pela metade a duração de um elemento de bit - para 4 μs e usar bits de sincronização não após cada bit de dados, mas apenas nos casos em que não haja um único bit de dados nos elementos de bit anteriores e atuais. Este método de codificação permite duplicar a capacidade de mídia e a taxa de transferência de dados em comparação com o método FM, porque o mesmo elemento de bit nunca contém um bit de sincronização e de dados, e há apenas uma mudança na direção do fluxo magnético por elemento de bit. Além disso, atualmente não está em uso.
A gravação Run Limited Length (RLL) é um método que elimina completamente a necessidade de gravar quaisquer bits de sincronização no disco. A sincronização é obtida através do uso de bits de dados. No entanto, esta abordagem requer um esquema de codificação completamente diferente, porque a simples exclusão dos bits de sincronização resultará no registro de sequências de apenas zeros ou uns nas quais não haverá mudança na polaridade do fluxo magnético. O método RLL é derivado dos métodos usados para codificar dados durante a gravação digital em fita magnética. Nesse caso, cada byte de dados é dividido em dois nibbles, que são codificados com um código especial de 5 bits, cuja essência é conseguir pelo menos uma mudança na direção do fluxo magnético para cada par de seus dígitos. O que significa que qualquer combinação de códigos de 5 dígitos não deve ter mais do que dois parado por perto zero bits. Das 32 combinações de 5 bits, 16 atendem a essa condição e são utilizadas para codificação pelo método RLL. Ao ler, ocorre o processo inverso. Ao usar o método de codificação RLL, a taxa de transferência de dados aumenta de 250 para 380 Kbps e o número de polaridades do fluxo magnético muda para 3330 alterações/cm. Neste caso, a duração do elemento bit é reduzida para 2,6 μs. Como o intervalo de tempo máximo antes das mudanças no fluxo magnético é conhecido (dois bits zero consecutivos), os bits de dados podem servir como bits de sincronização, o que torna o método de codificação RLL com auto-relógio e auto-relógio. O método MFM é um caso especial do método RLL. Para indicar o tipo de método RLL utilizado, é utilizada uma abreviatura do formato: RLL2.7, RLL1.7, RLL2.8, RLL1.8, onde o primeiro dígito é o mínimo e o segundo é o comprimento máximo do sequência de bits - zeros contidos entre os adjacentes. A abreviatura do método MFM na terminologia RLL é escrita como RLL1,3.
O registro modificado com codificação de grupo (Advanced Run Limited Length - ARLL) é um método RLL aprimorado, no qual, junto com a compactação lógica de dados, a frequência de troca entre o controlador e o drive é aumentada.
Para garantir o melhor desempenho e operação da unidade como dispositivo de armazenamento, bem como para melhorar a interface do software, as unidades não são utilizadas pelos sistemas em sua forma primária, mas, com base em estruturas fisicamente presentes - trilhas e setores, utilizam uma estrutura lógica para armazenar e acessar informações. Seu tipo e características dependem do sistema operacional utilizado e é denominado sistema de arquivos. Existem agora alguns tipos de sistemas de arquivos diferentes, quase tantos quanto sistemas operacionais diferentes; no entanto, todos eles baseiam suas estruturas lógicas de dados em várias estruturas lógicas primárias. Vamos dar uma olhada neles.
O primeiro setor do disco rígido contém o Master Boot Record (MBR), que contém o Boot Record (BR), que é executado durante o processo de inicialização do sistema operacional. Registro de inicialização de discos rígidos é alvo de ataque Vírus informáticos, infectando MBR. Atrás do bootloader há uma tabela de partições - Tabela de partição(PT) contendo 4 registros - elementos de partições lógicas - Partições. O MBR termina com uma assinatura especial - uma sequência de 2 bytes com valores hexadecimais 55H e AAH, indicando que esta seção, após a qual a assinatura está localizada, é a última seção da tabela. Abaixo está a estrutura do MBR.
armazenamento de informações do disco rígido
Tabela 1. Estrutura MBR
Cada elemento da tabela de partição contém informações sobre uma partição lógica. O primeiro byte no elemento de seção é o sinalizador de atividade da seção (0 - inativo, 128 (80H) - ativo). É usado para determinar se a partição é de inicialização do sistema e se o sistema operacional precisa ser carregado a partir dela quando o computador é inicializado. Apenas uma seção pode estar ativa. Pequenos programas chamados gerenciadores de inicialização ( Gerenciador de inicialização) pode estar localizado nos primeiros setores do disco. Eles perguntam interativamente ao usuário de qual partição inicializar e ajustam os sinalizadores de atividade da partição de acordo. O sinalizador de atividade da partição é seguido por um byte do número principal a partir do qual a partição começa. É seguido por dois bytes indicando o número do setor e o número do cilindro, respectivamente. setor de inicialização, onde está localizado o primeiro setor do bootloader do sistema operacional. O carregador do sistema operacional é um pequeno programa que lê o código inicial do sistema operacional na memória quando ele é iniciado. Isto é seguido por um byte - o identificador do código do sistema operacional localizado na partição. Após o byte do código do sistema operacional, há um byte do número principal do final da partição, seguido por dois bytes - o número do setor e o número do cilindro do último setor alocado para a partição. Abaixo está o formato do elemento da tabela de partição.
Tabela 2.Tabela de partição
|
Nome da entrada do elemento da tabela de partição |
Comprimento, bytes |
|
|
Sinalizador de atividade da seção |
||
|
Número principal do início da seção |
||
|
Número do setor e número do cilindro do setor de inicialização da partição |
||
|
Identificador de código do sistema operacional |
||
|
Número do cabeçalho final da seção |
||
|
Setor e número do cilindro do último setor da seção |
||
|
Palavras baixas e altas de dois bytes de número de setor inicial relativo |
||
|
Palavras baixas e altas de dois bytes do tamanho da partição em setores |
O elemento de partição é completado pelas palavras de dois bytes inferior e superior do número relativo do primeiro setor da partição e do tamanho da partição em setores, respectivamente.
Os números dos setores e o número dos cilindros dos setores nas seções ocupam 6 e 10 bits, respectivamente. Abaixo está o formato do registro contendo os números do setor e do cilindro.
Graças à presença de uma estrutura como o MBR, vários sistemas de arquivos de vários tipos de diferentes sistemas operacionais podem ser localizados em um disco rígido físico.
As estruturas MBR representam informações críticas, cujos danos levam à perda parcial ou total de acesso aos dados nos dispositivos lógicos do disco rígido e, possivelmente, à incapacidade de inicializar o sistema operacional a partir de mídia danificada.
Primeiro seção difícil O disco no MS-DOS é chamado de partição principal (partição primária) e a segunda estendida (partição estendida). A partição principal deve estar sempre presente no disco; o MS-DOS é carregado a partir dela. Pode não haver uma partição estendida; ela é criada somente quando é necessário ter mais de um dispositivo lógico em um disco físico. Uma partição lógica contém estruturas de sistema de arquivos como discos ou dispositivos lógicos ou volumes (projetados como subpartições), o carregador do sistema operacional, tabelas de distribuição de arquivos, áreas de dados do usuário nas quais os registros sobre diretórios e arquivos e dados de arquivos estão localizados. Em sua estrutura, as subpartições ou discos lógicos são semelhantes às partições. A principal diferença é que pode haver mais de quatro deles, e o último elemento de cada um indica se é a última subpartição lógica de uma partição, ou aponta para o próximo elemento do dispositivo lógico ou tabela de subpartições. A tabela de subpartição é construída apenas na tabela de partição estendida, cada um de seus elementos corresponde a um dispositivo lógico com um nome de caractere único D:, E:, etc.. A tabela de partição principal contém apenas um dispositivo lógico - unidade C:. Uma tabela de subpartição é criada quando uma tabela de partição estendida é criada e o número de elementos da tabela de subpartição é definido pelo usuário. Ao determinar o número de dispositivos lógicos, o usuário também determina a parcela de espaço em disco da partição estendida alocada para cada dispositivo lógico - define o volume dos discos lógicos. No futuro, o número e o tamanho dos dispositivos lógicos não poderão ser alterados sem perder os dados localizados nos dispositivos lógicos redistribuídos.
A etapa mais importante na preparação ou operação de um disco rígido é a formatação. Formatar um HDD significa apagar completamente os dados do disco rígido em preparação para trabalhos futuros. Os discos modernos já vêm formatados.
A formatação de baixo nível é o processo de aplicação de informações sobre a posição de trilhas e setores, bem como de registro de informações de serviço para o servo sistema. Às vezes, esse processo é chamado de formatação "verdadeira" porque cria um formato físico que determina como os dados serão organizados. Quando o processo de formatação de baixo nível de um disco rígido é iniciado pela primeira vez, os pratos do disco rígido estão vazios, ou seja, não contêm absolutamente nenhuma informação sobre setores, trilhas, etc. Este é o último momento em que o disco rígido fica com os pratos completamente vazios. As informações registradas durante esse processo nunca mais serão reescritas.
Os discos rígidos antigos tinham o mesmo número de setores por trilha e não possuíam controladores integrados, portanto, a formatação de baixo nível era feita pelo controlador do disco rígido externo, e a única informação necessária era o número de trilhas e o número de setores. por faixa. Usando essas informações, o controlador externo poderia formatar o disco rígido. Os discos rígidos modernos têm uma estrutura interna complexa, incluindo alterações no número de setores por trilha ao passar de trilhas externas para internas, bem como informações servo integradas para controlar os cabeçotes da unidade. Além disso, as unidades modernas usam a tecnologia de setores defeituosos “invisíveis”, ou seja, pode, despercebido pelo usuário e pelo sistema, pular automaticamente setores defeituosos. Devido a esta complexa estrutura de dados, todos moderno difícil unidades passam formatação de baixo nível apenas uma vez - no fabricante. Não há como realizar em casa uma formatação de baixo nível de qualquer disco rígido moderno, seja um disco rígido IDE/ATA, IDE/SATA ou SCSI. Além disso, isso não pode ser feito mesmo nas condições de um bom centro de serviços (em Centro de serviço você pode realizar uma espécie de formatação de “nível médio”, que pode substituir informações sobre setores defeituosos ignorados, mas não será possível sobrescrever a distribuição física dos setores e informações do servo de serviço).
Os discos rígidos mais antigos exigiam formatações repetidas de baixo nível ao longo de sua vida útil devido aos efeitos de expansão térmica associados ao uso de motores de passo no cabeçote, onde o movimento dos cabeçotes era dividido em uma grade de passo fixo. Com o tempo, a disposição física dos setores e trilhas nesses drives mudou, o que não permitiu a leitura correta das informações por meio de um motor de passo no cabeçote magnético. Aqueles. o cabeçote moveu-se para a posição desejada, de acordo com o controlador, enquanto a posição da trilha especificada mudou, o que levou ao aparecimento setores defeituosos. Este problema foi resolvido reformatando a unidade em um nível baixo, reescrevendo trilhas e setores usando uma nova grade de etapas da unidade principal. Em drives modernos que usam uma bobina de voz no cabeçote, o problema da expansão térmica ficou em segundo plano, forçando apenas a recalibração da temperatura dos parâmetros operacionais do cabeçote.
· Formatação de disco rígido de alto nível
Após concluir o processo de formatação de baixo nível do disco rígido, você receberá um disco com trilhas e setores, mas o conteúdo dos setores será preenchido com informações aleatórias. A formatação de alto nível é o processo de gravação de uma estrutura de sistema de arquivos em um disco que permite que o disco seja usado pelo sistema operacional para armazenar programas e dados. No caso de um sistema operacional DOS, por exemplo, o comando format faz esse trabalho gravando o registro mestre de inicialização e a tabela de alocação de arquivos como tal estrutura. A formatação de alto nível é realizada após o processo de divisão do disco em partições (partições), mesmo que apenas uma partição seja usada para todo o volume da unidade. Nos sistemas operacionais modernos, o processo de particionamento e formatação de um disco rígido pode ser realizado tanto durante a instalação do sistema operacional quanto já sistema instalado usando uma interface gráfica intuitiva.
A diferença entre formatação de alto e baixo nível é grande. Não há necessidade de realizar formatação de baixo nível para apagar informações do disco rígido porque... A formatação de alto nível é adequada para a maioria dos casos. Ele sobrescreve as informações de serviço do sistema de arquivos, limpando o disco rígido, porém, os próprios arquivos não são apagados durante esse processo, apenas as informações sobre a localização do arquivo são apagadas. Aqueles. após a formatação de alto nível do disco rígido que contém os arquivos, teremos um disco limpo, livre de quaisquer arquivos, mas usando várias maneiras recuperação de dados, você pode acessar arquivos antigos que estavam no disco antes de ele ser formatado. Todos os sistemas operacionais usam vários programas para formatação de alto nível, porque... eles usam Vários tipos sistemas de arquivos. Entretanto, a formatação de baixo nível, o processo de marcação de trilhas e setores em um disco, é o mesmo. A única diferença é a tecnologia de gravação de faixas e setores do disco. Isso é feito por dispositivos especiais chamados servo-escritores. /6/
O controlador do drive está fisicamente localizado na placa eletrônica e foi projetado para fornecer operações de conversão e enviar informações dos cabeçotes de leitura/gravação para a interface do drive. Um controlador de disco rígido é um dispositivo complexo - um microcomputador, com processador próprio, RAM e ROM, circuitos e sistema de entrada/saída, etc. No entanto, na maioria dos casos, os fabricantes os colocam em um ou dois microchips.
O controlador lida com muitas operações de transformação de fluxo de dados. Como os comprimentos das trilhas são desiguais, os dados devem ser gravados em trilhas diferentes de maneira desigual. Isso se torna um problema, comparado aos disquetes, para mídias de alta densidade (mais de 1.000 trilhas). Controladores simples normalmente gravam a mesma quantidade de informações em cada trilha, independentemente de seu comprimento. Para fazer isso, o controlador empacota os dados de forma mais densa, começando em uma trilha específica. O cilindro a partir do qual começa o empacotamento de dados mais denso é chamado de Cilindro Inicial para Pré-compensação (SCP). Para compensar a distorção da informação durante a leitura, os dados são gravados com um deslocamento preliminar de bits, que leva em consideração a distorção.
Muitos fabricantes criam dispositivos que registram diferentes quantidades de informações em trilhas internas e externas, colocando nelas diferentes números de setores. Isto é possível graças ao facto de o hardware ocultar dos programas e do utilizador as características físicas do dispositivo ao nível do seu controlador e/ou interface (dispositivos com interfaces IDE, EIDE e SCSI). As unidades possuem diferentes números físicos e lógicos de cilindros.
Muitos sistemas operacionais que funcionam com unidades LMD por meio do BIOS são projetados de tal forma que não podem operar com um número de cilindros superior a 1.024. Como atualmente, unidades de grande volume (mais de 1 MB) possuem mais de 1.024 cilindros físicos , é usada uma conversão de software, na qual a unidade é definida por seu controlador e procedimentos do BIOS como tendo no máximo 1.024 cilindros, mas possuindo um número irreal de cabeçotes, superfícies e setores. A função de recálculo para encontrar o setor necessário recai no BIOS do PC, ou no BIOS do controlador, ou na interface.
Os dados gravados em setores são protegidos contra certos erros de leitura/gravação calculando e escrevendo junto com eles uma soma de verificação - um Código de Correção de Erros (ECC). Ao gravar bytes no disco, o adaptador acumula dividindo ciclicamente os dados de entrada em um restante polinomial especial da divisão, que representa uma combinação única de bits e é gravado pelo controlador junto com os dados. O número de bytes ECC para cada dispositivo é determinado pelo tipo de polinômio utilizado. Ao ler os dados, um cálculo semelhante de acumulação e soma de verificação é executado. Se os resultados calculados e armazenados não corresponderem aos dados ECC, é feita uma tentativa de restauração - correção dos dados usando um polinômio, dados disponíveis e uma soma de verificação. O número de bytes de dados que podem ser ajustados é determinado pela ordem do polinômio utilizado. Quanto maior for, mais bytes consecutivos podem ser corrigidos, mas mais longo será o próprio código ECC.
Diferentes polinômios são usados e o número de bytes ECC pode ser de 4 a 8 ou mais. O número de bits de informação necessários para gravar um byte depende do método de codificação utilizado. Ressalta-se que a recuperação de dados utilizando polinômio e código ECC ocorre no nível do controlador e é transparente para os programas e para o usuário, porém, com base nos procedimentos do BIOS, é possível obter programaticamente informações sobre se o procedimento de correção foi realizado.
A maioria das unidades modernas oferece suporte aos modos de controlador Ultra DMA, DMA2 e PIO. DMA - Direct Memory Access - acesso direto à memória - um modo de interação entre o controlador do drive e a interface do PC, no qual os dados são trocados pela interface sem participação processador central PC. O modo DMA permite aliviar significativamente o processador em comparação com o modo PIO (Programmed Input/Output), no qual todas as transferências são realizadas diretamente pelo processador central do PC. Isto é conseguido através da utilização de um controlador especial e de um canal de acesso direto à RAM do PC, sem a participação do processador central. Todos os drives modernos podem operar em modo DMA2, se suportados pelo sistema operacional, e a velocidade de transferência pode atingir, dependendo do modelo, 16,6 MB/s. E unidades e sistemas que suportam o modo Ultra DMA, ao usar o driver apropriado, podem transmitir e receber informações a uma velocidade de 33,3 MB/s. No entanto, estas são apenas as velocidades máximas possíveis de troca de dados entre o controlador e o buffer de armazenamento.
A velocidade real de leitura/gravação mesmo em melhores modelos com a interface ATA atualmente não excede 10-11 Mb/s. A principal carga de trabalho recai sobre a leitura/gravação; a transferência de dados de e para o buffer leva apenas uma pequena parte desse tempo, e o próprio fato de mudar para o Ultra DMA proporciona um aumento de apenas alguns por cento. Mas as unidades com Ultra DMA geralmente têm uma velocidade de eixo alta e, portanto, uma velocidade de leitura/gravação mais alta.
Atualmente, existem dois padrões mais comuns para conectar um disco rígido a um computador. O primeiro, mais comum entre PCs domésticos e de escritório, é o IDE (Integrated Device Electronics - um dispositivo com controlador integrado), também conhecido como ATA (AT Attachment - conectado ao AT). O segundo pode ser encontrado com mais frequência em servidores e estações de trabalho de alto desempenho - SCSI (Small Computer System Interface). Esta interface não é especializada para dispositivos de disco. Além de discos rígidos e unidades de CD-ROM, há um grande número de dispositivos que funcionam de acordo com esse padrão.
O padrão de interface IDE foi desenvolvido por vários motivos. Os mais significativos são:
· Uma maneira mais fácil de conectar um disco rígido ao barramento do computador. Um disco rígido IDE pode ser conectado a um barramento de sistema de computador de alto desempenho e a uma porta LPT lenta com a mesma facilidade. É claro que, neste último caso, a troca de dados será muito menor, mas existe essa possibilidade.
· Maior desempenho. O controlador de disco está localizado diretamente no dispositivo, o que permite a transmissão contornando longos fios de interface.
Existem várias maneiras de conectar um dispositivo IDE ao seu computador. O mais comum é a conexão por cabo de 40 fios (tipo interface AT-BUS). A interface é de 16 bits. O segundo tipo é PC Card ATA - usando PC Card (PCMCIA), que também possui interface de 16 bits. Este tipo é usado principalmente em laptops. Além da conexão, os tipos de interface ATA também diferem na velocidade de transferência de dados. O principal deles é o CAM ATA (Common Access Method) – padrão definido pela ANSI. Garante a compatibilidade do dispositivo IDE nos níveis de sinal e comando. Também permite conectar até dois dispositivos em um cabo. O comprimento do cabo não é superior a 46 cm.
ATA-2 é uma extensão da especificação ATA. Possui dois canais, o que permite conectar até 4 dispositivos, suporta discos de até 8GB. Suporta modos de operação PIO Modo 3, Modo DMA 1, Modo Bloco. Falaremos sobre esses termos a seguir.
A próxima extensão é Fast ATA-2. Difere apenas no suporte ao Modo DMA 2, que permite atingir velocidades de transferência de dados de até 13,3 MB/s e na presença do Modo PIO 4.
ATA-3. Esta extensão visa mais melhorar a confiabilidade. Inclui gerenciamento de energia aprimorado e tecnologia SMART (Self Monitoring Analysis and Report Technology).
Ultra DMA/33 - a velocidade de troca de dados no barramento é de 33 MB/seg. Além disso, foi adicionado o controle dos dados transmitidos. Há relativamente pouco tempo, surgiu o padrão UDMA/66, no qual a velocidade foi aumentada para 66 MB/s, e o UDMA/100 foi anunciado recentemente.
Deve-se notar que os valores indicados são apenas os valores máximos possíveis. Na realidade, a velocidade de transferência de dados pode ser significativamente menor. Isso depende da velocidade de rotação dos discos, da velocidade da eletrônica, do funcionamento da memória e do processador.
Além dos tipos acima, há também uma extensão ATAPI (ATA Package Interface). Esta extensão foi projetada para conectar unidades de CD-ROM, unidades CDRW, unidades de fita, unidades ZIP e outros dispositivos à interface ATA.
Todos os padrões acima são eletricamente compatíveis entre si.
DMA (Acesso direto à memória - acesso direto à memória). Ao operar neste modo, a troca de dados entre o buffer do disco rígido e a memória do computador é realizada diretamente pelo controlador do disco rígido. Os modos DMA são divididos em palavra única e multipalavra, dependendo do número de palavras transmitidas em uma sessão de trabalho com o barramento. No caso do modo de palavra única, a velocidade máxima de transferência é de até 8,3 MB/seg. Ao usar o modo multipalavras - até 20 MB/seg. Os acessos são feitos em pausas entre os acessos da CPU à memória. Este modo economiza tempo do processador, mas reduz ligeiramente a velocidade de troca.
LBA (Logical Block Addressing) - endereçamento de blocos lógicos. O padrão ATA aborda um setor de acordo com o esquema clássico - cilindro, cabeçote e número do setor. Contudo, por razões históricas, BIOS do computador e o sistema operacional DOS limitou o número de setores (63) e cilindros (1.024). Como resultado disso, apareceu uma limitação na capacidade do disco rígido de 540 MB. No modo LBA, o endereço é transmitido como um número de setor linear absoluto. Nesse caso, o próprio Winchester converte nos números de cilindros, cabeçotes e setores de que necessita. Isso nos permitiu contornar as restrições de espaço no disco rígido, mas para DOS ainda são 8 GB. O dispositivo só poderá funcionar se este modo for suportado pelo driver (BIOS) e pelo próprio dispositivo.
Há também um modo Grande - este modo é usado pelo Award BIOS para trabalhar com discos rígidos de até 1 GB que não suportam o modo LBA. Não é recomendado usar este modo com discos maiores que 1GB. /7/
Tabela 3. Comparação de interfaces
|
Suporte. capacidade, Mbit/s |
Comprimento máximo do cabo, m |
Cabo de energia |
Número de unidades por canal |
Número de condutores no cabo |
Outras características |
||
|
Sim (3,5") / Não (2,5") |
Controller+2Slave, troca a quente não é possível |
||||||
|
Host/Slave, hot swappable em alguns controladores |
|||||||
|
sem dados |
|||||||
|
Sim/Não (dependendo da interface e do tipo de unidade) |
|||||||
|
4,5 (com conexão em cadeia até 72 m) |
dispositivos são iguais, a troca a quente é possível |
||||||
|
5 (com conexão serial, via hubs, até 72 m) |
Host/Escravo, com troca a quente |
||||||
|
sem dados |
Sim/Não (dependendo do tipo de unidade) |
sem dados |
Bidirecional, compatível com USB 2.0 |
||||
|
dispositivos são iguais, a troca a quente é possível |
|||||||
|
troca a quente possível |
A placa eletrônica de uma unidade de disco rígido moderna é um microcomputador independente com processador, memória, dispositivos de entrada/saída próprios e outros atributos tradicionais inerentes a um computador. Pode haver muitos interruptores e jumpers localizados na placa.
Todos os inversores atendem aos padrões determinados por comitês e grupos de padrões independentes ou pelos próprios fabricantes. Dentre as inúmeras características técnicas que distinguem um modelo do outro, podemos destacar algumas que são mais importantes do ponto de vista dos usuários e fabricantes.
O diâmetro do disco é um parâmetro bastante livre. As unidades mais comuns com diâmetros de disco são 2,2, 2,3, 3,14 e 5,25 polegadas. O diâmetro dos discos determina a densidade de gravação por polegada de revestimento magnético. Unidades maiores contêm mais trilhas e normalmente usam tecnologias de mídia mais simples, projetadas para densidades de gravação mais baixas. Eles são mais lentos e possuem menos discos, mas são mais confiáveis. Unidades de grande capacidade com diâmetros menores possuem mais superfícies de alta tecnologia e maiores densidades de armazenamento, bem como um maior número de discos.
Número de superfícies (número de lados) - determina o número de discos físicos amarrados no fuso. Os drives estão disponíveis com número de superfícies de 1 a 8 ou mais. Porém, os mais comuns são dispositivos com número de superfícies de 2 a 5. O número de superfícies determina diretamente o volume físico do acionamento e a velocidade de processamento das operações em um cilindro. Como as operações nas superfícies do cilindro são realizadas por todos os cabeçotes de forma síncrona, então, sendo todas as outras condições iguais, os acionamentos com maior número de superfícies serão mais rápidos.
Número de cilindros (número de cilindros) - determina quantas trilhas (trilhas) estarão localizadas em uma superfície. Atualmente, todos os drives com capacidade superior a 1 Gigabyte possuem um número de cilindros superior a 1.024, pelo que, para sistemas operacionais comuns, são utilizados modos de acesso unificados com recálculo e emulação e virtualização do número de cabeçotes, cilindros e setores (LBA e Grande).
Número de setores (contagem de setores) - o número total de setores em todas as trilhas de todas as superfícies da unidade. Define o volume físico não formatado do dispositivo.
Número de setores por trilha - o número total de setores em uma trilha. Muitas vezes, para unidades modernas, o indicador é condicional, porque possuem um número desigual de setores nas trilhas externas e internas, ocultos do sistema e do usuário pela interface do dispositivo.
Velocidade do fuso (velocidade de rotação ou velocidade do fuso) - determina quanto tempo será gasto na leitura sequencial de uma trilha ou cilindro. A velocidade de rotação é medida em rotações por minuto (rpm). Para discos com capacidade de até 1 gigabyte, costuma ser igual a 5.400 rpm, e para discos maiores chega a 7.200 e 10.000 rpm.
O tempo de busca faixa a faixa é normalmente entre 3,5 e 5 milissegundos, com os modelos mais rápidos variando de 0,6 a 1 milissegundo. Mover-se de uma trilha para outra é o processo mais longo em uma série de processos aleatórios de leitura/gravação em um dispositivo de disco. O indicador é usado para avaliar condicionalmente o desempenho ao comparar unidades modelos diferentes e fabricantes.
O tempo de latência da cabeça é o tempo que decorre desde o momento em que as cabeças são posicionadas na trilha necessária até o início da operação de leitura/gravação. É um indicador técnico interno incluído no indicador - o tempo de transição de uma faixa para outra.
O tempo de configuração ou tempo de busca é o tempo gasto pelo dispositivo movendo as cabeças de leitura/gravação para o cilindro desejado a partir de uma posição arbitrária.
O tempo médio de busca é o resultado médio de um grande número de operações de posicionamento em diferentes cilindros, geralmente chamado de tempo médio de posicionamento. O tempo médio de busca tende a diminuir à medida que a capacidade de armazenamento aumenta à medida que a densidade de gravação aumenta e o número de superfícies aumenta. Para discos de 540 megabytes, os valores mais típicos são de 10 a 13, e para discos com mais de um gigabyte, de 7 a 10 milissegundos. O tempo médio de pesquisa é um dos indicadores mais importantes para avaliar o desempenho das unidades utilizadas na comparação.
Tempo de espera (latência) - o tempo necessário para passar o setor desejado ao chefe; o indicador médio é o tempo médio de espera (latência média), obtido como a média de inúmeras aprovações no teste. Depois que os cabeçotes do cilindro necessário se acalmarem, o controlador procura o setor desejado. Neste caso, os identificadores de endereço de cada setor da pista que passa sob o cabeçote são lidos sequencialmente. Num caso ideal, do ponto de vista do desempenho, o setor requerido aparecerá imediatamente sob a cabeça; num caso ruim, acontecerá que este setor acabou de “passar” sob a cabeça, e antes do final do assentamento processo será necessário aguardar uma revolução completa do disco para concluir a operação de leitura/gravação. Este tempo para unidades com capacidade de 540 megabytes a 1 gigabyte é de aproximadamente 5,6, e para discos com mais de um gigabyte - 4,2 milissegundos ou menos.
Tempo de acesso - tempo total gasto na instalação de cabeçotes e na espera de um setor. Além disso, o período de tempo mais longo é o tempo de instalação dos cabeçotes.
Tempo médio de acesso (tempo médio de acesso) - o tempo que passa desde o momento em que uma solicitação de operação de leitura/gravação é recebida do controlador até a implementação física da operação - o resultado da soma do tempo médio de pesquisa e do tempo médio de espera . O tempo médio de acesso depende de como o armazenamento de dados é organizado e da rapidez com que os cabeçotes de leitura e gravação são posicionados na trilha necessária. O tempo médio de acesso é uma média de várias execuções de testes e normalmente varia de 10 a 18 milissegundos e é usado como base para comparar a velocidade de unidades de diferentes fabricantes.
A taxa de transferência de dados, também chamada de taxa de transferência, determina a velocidade com que os dados são lidos ou gravados no disco depois que os cabeçotes estão na posição necessária. Medido em megabytes por segundo (MBps) ou megabits por segundo (Mbps) e é uma característica do controlador e da interface. Existem dois tipos de velocidade de transmissão - externa e interna. A velocidade de transferência de dados também é um dos principais indicadores de desempenho dos drives e é usada para avaliar e comparar drives de diferentes modelos e fabricantes.
A taxa de transferência de dados externa ou taxa de transferência de dados em rajada mostra a rapidez com que os dados são lidos de um buffer localizado na unidade para a RAM do computador. Atualmente, unidades com interfaces EIDE ou Fast ATA geralmente possuem taxas de transferência de dados externos de 11,1 a 16,6 megabytes por segundo, e para unidades com interfaces SCSI-2 esse parâmetro varia de 10 a 40 megabytes por segundo.
A taxa de transferência interna ou taxa de transferência sustentada reflete a velocidade na qual os dados são transferidos entre os cabeçotes e o controlador da unidade e determina a taxa geral de transferência de dados nos casos em que o buffer não é usado ou não tem impacto (por exemplo, ao carregar um grande gráfico ou arquivo de vídeo). A taxa interna de transferência de dados depende muito da velocidade do fuso.
Tamanho do buffer do cache do controlador (tamanho interno do dinheiro). O buffer embutido na unidade desempenha a função de cache proativo e foi projetado para suavizar a enorme diferença de desempenho entre o disco do computador e a RAM. As unidades estão disponíveis com buffers de 128.256 e 512 kilobytes. Quanto maior o tamanho do buffer, maior será o desempenho potencialmente maior para leitura/gravação "longa" aleatória. Além disso, um buffer mais espaçoso garante maior desempenho do subsistema de disco, em primeiro lugar, ao trabalhar com dados grandes e ordenados (gravados em discos sequencialmente) e, em segundo lugar, quando vários aplicativos ou usuários acessam simultaneamente o disco, como acontece em sistemas operacionais de rede multitarefa. .
Consumo médio de energia (capacidade). Ao montar poderoso computadores desktop a energia consumida por todos os seus dispositivos é levada em consideração. As unidades de HDD modernas consomem de 5 a 15 Watts, o que é bastante aceitável, embora, em igualdade de circunstâncias, as unidades com menor consumo de energia pareçam mais atraentes. Isto aplica-se não só à poupança de energia, mas também à fiabilidade, porque... Unidades mais potentes dissipam o excesso de energia na forma de calor e ficam muito quentes. E como você sabe, os problemas associados à alteração de propriedades mídia magnética dependem diretamente da sua temperatura e do coeficiente de expansão/compressão do material.
O nível de ruído é, obviamente, um indicador ergonômico. No entanto, é também um indicador do equilíbrio do projeto mecânico, porque o ruído na forma de estalo nada mais é do que o som dos impactos do posicionador de um mecanismo de passo ou linear, e mesmo microchoques e vibrações são tão indesejáveis para os acionamentos e levam a um desgaste mais rápido.
Capacidade de armazenamento físico e lógico. A mídia de disco rígido, diferentemente dos disquetes, possui um número constante de trilhas e setores, que não podem ser alterados. Esses números são determinados pelo tipo de modelo e fabricante do dispositivo. Portanto, o volume físico dos discos rígidos é determinado inicialmente e consiste no volume ocupado pelas informações de serviço (disposição do disco em trilhas e setores) e no volume disponível para os dados do usuário. O volume físico de um disco rígido também depende do tipo de interface, método de codificação de dados, formato físico utilizado, etc. Os fabricantes de unidades indicam as capacidades dos discos em milhões de bytes, assumindo, com base no sistema decimal, que existem 1.000.000 bytes em um megabyte. No entanto, o software não opera em sistemas decimais, mas em sistemas binários, acreditando que um quilobyte não contém 1.000 bytes, mas 1.024. Essas discrepâncias simples nos sistemas numéricos levam a inconsistências na estimativa da capacidade de armazenamento dada na descrição e dada por vários testes de software. .
...Disco rígido (disco rígido): conceito geral, finalidade, estrutura. Operações básicas de manutenção de disco. O processo de formatação de um disco. Defeitos lógicos e físicos que aparecem no disco e métodos para eliminá-los. Desfragmentação e limpeza do disco rígido.
apresentação, adicionada em 23/10/2013
A estrutura interna da maioria das unidades de disco. Formatando um disco rígido magnético (disco rígido). Arquitetura física e estrutura lógica de drives de disco. Funções do sistema de arquivos. Parâmetros físicos e lógicos de discos rígidos.
resumo, adicionado em 19/02/2011
Unidades magnéticas como meio mais importante para armazenar informações em um computador. Tipos, design e funcionamento de dispositivos de armazenamento magnético. Mídia magnética: disquete, memória flash, super disquete. CDs e discos versáteis digitais, seus formatos.
resumo, adicionado em 23/04/2011
Fabricantes de discos rígidos e sua classificação. Aumentando a densidade de gravação no disco rígido. Matrizes de disco, alguns aspectos da implementação de sistemas RAID. Sistemas de arquivos FAT 16, FAT 32, NTFS. Discos com criptografia integrada. Formatando o disco rígido.
livro, adicionado em 10/09/2013
Análise do princípio de funcionamento de drives em discos rígidos magnéticos de computadores pessoais. Cartão perfurado como suporte de informações em forma de cartão de papel ou papelão. Funções básicas do sistema de arquivos. Métodos para recuperar informações de matrizes RAID.
tese, adicionada em 15/12/2012
Armazenamento em disquete. Mídia de armazenamento removível. Dispositivo de armazenamento para disquetes magnéticos. Acesso às informações registradas em um cilindro. Especificações disquetes. Unidades de disco rígido e seu design.
apresentação, adicionada em 13/08/2013
Análise comparativa e avaliação das características de unidades de disquete e disco rígido. Dispositivo físico, organização do registro de informações. Organização física e lógica de dados, adaptadores e interfaces. Tecnologias avançadas de produção.
tese, adicionada em 16/04/2014
Dispositivos de armazenamento em discos magnéticos rígidos. Dispositivo de disco rígido. Interfaces rígidas discos. ATA, interface Serial ATA. Testando o desempenho de unidades de disco rígido. Análise comparativa de unidades Serial ATA e IDE.
apresentação, adicionada em 11/12/2013
Uma unidade de disco rígido é o principal dispositivo de armazenamento na maioria dos computadores. Estrutura do dispositivo. Unidade eletrônica. Características da geometria dos discos com controladores integrados. Endereçamento de memória. Tipos de interfaces. Tendências de desenvolvimento.
apresentação, adicionada em 20/11/2013
O disco rígido como principal dispositivo de armazenamento de informações. Principais características e aparência geral do exterior e disco interno. Interface, capacidade, tamanho físico, velocidade do fuso e transferência de dados. Instalação e manutenção de discos rígidos.
Estudantes, estudantes de pós-graduação, jovens cientistas que utilizam a base de conhecimento em seus estudos e trabalhos ficarão muito gratos a você.
Postado em http://www.allbest.ru/
Índice
EM Os dispositivos de armazenamento de informações produzidos industrialmente representam uma gama de dispositivos de armazenamento com diferentes princípios de operação e características de desempenho físico e técnico. Um meio de armazenamento é um objeto material usado para armazenar informações. Um dispositivo de armazenamento é um dispositivo mecânico que controla a gravação, armazenamento e leitura de dados. Existem unidades de disquete e unidades de disco rígido magnético. A principal propriedade e finalidade dos dispositivos de armazenamento de informações é o seu armazenamento e reprodução. Os dispositivos de armazenamento são geralmente divididos em tipos e categorias de acordo com seus princípios operacionais, operacionais, técnicos, físicos, de software e outras características. Por exemplo, de acordo com os princípios de funcionamento, distinguem-se os seguintes tipos de dispositivos: eletrônicos, magnéticos, ópticos e mistos - magneto-ópticos. Cada tipo de dispositivo é organizado com base em uma tecnologia correspondente de armazenamento, reprodução e gravação de informação digital. Portanto, em relação ao tipo e desenho técnico do suporte de informações, distinguem-se: dispositivos eletrônicos, de disco e de fita. Além disso, em meu trabalho de qualificação final, falaremos sobre mídias de armazenamento em disco e, em particular, sobre uma análise comparativa e avaliação das capacidades das unidades de disco magnético rígido e de disquete.
Unidades de disquete e disco magnético rígido (doravante denominadas FMD e HDD, respectivamente) são unidades externas ou memória externa. Memória externa refere-se a dispositivos externos computador pessoal(doravante denominado PC), conectado por meio de cabos a placa-mãe computador e é usado para armazenamento de longo prazo de qualquer informação que possa ser necessária para resolver problemas (Fig. 1. Apêndice 1). Em particular, em memória externa Todo o software de computador é armazenado. A memória externa contém vários tipos de dispositivos de armazenamento, mas os mais comuns, encontrados em quase todos os computadores, são as unidades de disco rígido (HDD) e as unidades de disquete (HD). A base para registrar, armazenar e ler informações é baseada em dois princípios físicos, magnético e óptico. O princípio magnético é usado em FLMD e HDD. Com o método magnético, as informações são registradas em um meio magnético (disco revestido com verniz ferromagnético) por meio de cabeças magnéticas.
Durante o processo de gravação, uma cabeça com núcleo feito de material magnético macio (baixa magnetização residual) se move ao longo da camada magnética da mídia magneticamente dura (alta magnetização residual). Pulsos elétricos criam um campo magnético na cabeça, que magnetiza sequencialmente (1) ou não magnetiza (O) os elementos do portador. Ao ler informações, áreas magnetizadas do portador causam um pulso de corrente na cabeça magnética (fenômeno de indução eletromagnética). A principal propriedade dos dispositivos magnéticos de disco é a gravação de informações na mídia em trilhas concêntricas fechadas usando codificação digital física e lógica de informações. A mídia de disco plana gira durante o processo de leitura/gravação, o que garante a manutenção de toda a trilha concêntrica; a leitura e a gravação são realizadas usando cabeças magnéticas de leitura/gravação, que são posicionadas ao longo do raio da mídia de uma trilha para outra. Para conectar o HDD e o HDD a um PC, são usados dispositivos especiais, chamados adaptadores ou controladores. Esses dispositivos são inseridos no conector do barramento do sistema do PC e o HDD e o HDD são conectados a eles por meio de cabos especiais.
drive de disco rígido
O objetivo do HDD e do HDD é armazenar grandes quantidades de informações, registrar e também enviar as informações armazenadas mediante solicitação para um dispositivo de memória de acesso aleatório. Como vocês sabem, os primeiros computadores (computadores eletrônicos) eram monotarefa, ou seja, foram programados e criados para resolver apenas um problema, por exemplo, calcular reações nucleares ou trajetórias de mísseis. Eram computadores baseados em lâmpadas e semicondutores, mas com o desenvolvimento da tecnologia surgiram máquinas programáveis, nas quais o programa era configurado por meio de cartões perfurados, mas todas essas máquinas não possuíam dispositivo de armazenamento, ou seja, apenas recebiam informações, processavam e reproduziu-o, mas não o armazenou. Porém, com o desenvolvimento da tecnologia informática, em particular dos computadores pessoais, surgiu a necessidade de dispositivos de armazenamento de informação. Nessa época (início dos anos 70), com o advento do computador pessoal, surgiu o conceito de dispositivos de armazenamento. No início, eram unidades de disquete contendo o sistema operacional, ou seja, funcionavam assim: ao inicializar o computador, era inserido um disquete no drive, a partir do qual o sistema operacional era carregado na RAM do computador e após o qual o usuário podia iniciar programas e trabalhar com eles. Isso era suficiente para os primeiros sistemas operacionais, como o MS DOS, mas não muito conveniente, porque... Os disquetes até hoje não são confiáveis, então a solução foi criar drives em discos rígidos magnéticos. O método de leitura e gravação em drives é o mesmo - usando campos magnéticos, mas a implementação deste princípio usando HDDs teve mais sucesso, porque discos magnéticos rígidos são diferentes Ó maior capacidade e confiabilidade, por isso esse drive se tornou a memória principal de um computador já no início dos anos 80 e atingiu um volume várias vezes maior que o de um drive de disco não volátil. Posteriormente, com o advento dos sistemas operacionais da família Windows (versões 3.1 e 3.11), os disquetes não puderam fornecer armazenamento e carregamento operacional dos sistemas operacionais, o que finalmente determinou o HDD como a memória principal, na qual os programas e sistemas operacionais começaram a ser escrito e fazê-lo até hoje. O que aconteceu a seguir com as unidades de disquete? Começaram a ser utilizados como meio de transferência de informações entre computadores, pois Os HDDs revelaram-se inadequados para a mesma finalidade, embora tenham maior capacidade de memória e velocidade de leitura/gravação, estão localizados dentro da unidade de sistema e para removê-los ou conectá-los é necessário desligar o computador. Os disquetes permaneceram praticamente o único método operacional para troca de informações entre computadores pessoais até meados dos anos 90 e, embora agora nos países ocidentais, com o advento das unidades de DVD e SD-RW, além de conectar computadores em rede, eles sejam universalmente abandonando o uso de disquetes (a maioria computadores de escritório, combinado usando redes locais não estão mais equipados com unidades de disquete), mas hoje no CIS o grau de desenvolvimento da informatização é tal que é impossível abandonar as unidades de disquete magnético devido à sua eficiência e presença onipresente, o que é confirmado pelos volumes de vendas inalterados de disquetes magnéticos flexíveis.
Historicamente, ambas as unidades têm sido praticamente indistinguíveis em sua importância para a arquitetura do PC, mas Ó As unidades de disco rígido magnético, que são o principal dispositivo de armazenamento de um PC moderno, tornaram-se mais desenvolvidas até hoje. Nos estágios iniciais, as velocidades de operação e os volumes de informações armazenadas no HDD e no HDD eram praticamente os mesmos; isso foi na época dos PCs baseados em processadores i80386 e i80486, rodando o sistema MS DOS, pois isso foi determinado pela alocação de memória e pelo sistema de arquivos, e fisicamente a quantidade de memória não poderia exceder 512 KB. Mas com o advento dos sistemas de arquivos FAT 16 e FAT 32, e principalmente NTFS, foi possível aumentar a capacidade dos discos rígidos em milhares de vezes, enquanto os primeiros HDDs eram medidos em megabytes, agora seus valores chegam a dezenas ou até centenas de gigabytes. As unidades de disquete evoluíram de disquetes de 5,25 polegadas (havia também disquetes de 8 polegadas há muito não utilizados) para disquetes de 3,5 polegadas (os mais comuns agora entre usuários de PC), disquetes, o volume de informações gravadas em que varia de 720 KB a 2,88 MB, então é claro que hoje ninguém os considera uma alternativa aos HDDs, porém, eles também possuem um nicho próprio, pelo qual mesmo os fabricantes modernos de equipamentos de informática não podem recusá-los, embora tais afirmações tenham sido feito repetidamente, em particular pela SONY Corporation, que ocupa um lugar significativo no mercado de produção de disquetes, bem como pela SAMSUNG, fabricante de unidades de disco. Por que acontece que mesmo as configurações mais recentes dos computadores incluem unidades de disquete? A resposta é simples, os fabricantes não podem recusar o NGMD, porque... Em termos de velocidade de transferência de pequenos arquivos, geralmente de texto (Word, Excel), os disquetes magnéticos são os líderes, e se você considerar que muitos usuários possuem modelos de computadores desatualizados que não estão equipados com métodos mais avançados de transferência de arquivos (por exemplo , unidades de CD-RW ou não conectadas à rede), mas funcionam como máquinas de escrever eletrônicas, fica claro que não será possível abandonar completamente o NGMD em um futuro próximo. Como pode ser visto acima, surge a questão de como esses drives diferem hoje, quais são seu desenvolvimento e perspectivas, confiabilidade e se vale a pena abandonar o HDD.
O objetivo do meu trabalho é uma análise comparativa e avaliação das características de unidades de disco não voláteis e unidades de disco rígido. Tarefas a serem resolvidas com base no objetivo definido:
1) Considere a estrutura física do HDD e do HDD, seu funcionamento;
2) Identificar suas características e avaliá-las;
3) Considerar tecnologias promissoras de discos rígidos e flexíveis;
4) Realize uma análise comparativa de unidades de disco não voláteis e unidades de disco não substituíveis.
Com base no exposto, a relevância do trabalho é indiscutível. O significado prático do trabalho reside no fato de que, com base nas informações apresentadas, é possível fazer uma análise entre os drives e selecionar o mais adequado, que será útil saber não só para usuários iniciantes, mas também para profissionais. neste campo, desde até o momento, a análise dos artigos mostrou que informação objetiva Há muito pouca informação sobre este tema e não está sistematizada.
1) foi selecionada e analisada a literatura disponível sobre o tema do trabalho de qualificação final;
2) As tarefas atribuídas a partir da finalidade do trabalho foram resolvidas;
Existem vários tipos de unidades de disquete; elas consistem em duas partes - uma unidade de disco e um disquete (meio de armazenamento de dados). Os dispositivos mais utilizados são aqueles com diâmetro de mídia de 203 mm (8"), 133 mm (5,25") e 89 mm (3,5"). Em computadores profissionais, disquetes sem disco com diâmetro de disco de 133 e 89 mm são mais usados. . Os disquetes modernos usam ambos os lados de um disco magnético. Esses disquetes são chamados de dupla face. Anteriormente, alguns modelos de PC usavam disquetes de um só lado. Para indicar o número de superfícies de trabalho em alguns disquetes importados, você pode ver o abreviatura: SS - Single Sided (disquete de face única), DS - Double Sided (disquete de dupla face).
Desde o advento das unidades de disquete, sua popularidade como meio de armazenamento de acesso aleatório para pequenos computadores aumentou rapidamente. Uma das razões para esse crescimento fenomenal foi que durante esse período a capacidade do disquete aumentou mais de 10 vezes. Aproximadamente 40% desse aumento foi resultado de melhorias na parte mecânica do drive de disco, que possibilitou dobrar a densidade das trilhas e passar a gravar nos dois lados do disco. Mas os restantes 60% são consequência da introdução de vários métodos de codificação de dados que permitem uma utilização mais eficiente da superfície de trabalho do disco.
O dispositivo NGMD (Fig. 2 do Apêndice 1) inclui um disco magnético flexível (os discos são chamados de flexíveis porque o disco de plástico localizado dentro do envelope protetor na verdade dobra, razão pela qual o envelope protetor é feito de plástico rígido), cinco principais sistemas (mecanismo de acionamento, mecanismo de posicionamento, mecanismo de centralização e fixação, sistema de controle e monitoramento, sistema de gravação e leitura) e três sensores especiais. O disco é coberto na parte superior por uma camada magnética especial, que garante o armazenamento dos dados. As informações são gravadas em ambos os lados do disco ao longo de trilhas que são círculos concêntricos. Cada faixa é dividida em setores. Através do orifício central, o disquete é colocado sobre um eixo truncado em forma de cone, um fuso (cubo), que gira em velocidade constante. O cassete possui uma janela oval - o orifício da cabeça é alongado na direção radial. Através deste orifício, a cabeça magnética é pressionada contra o disco, registrando e lendo os dados por contato nos locais necessários de sua superfície. A cabeça magnética, movendo-se nas ranhuras do cassete, permite gravar dados eletromagneticamente na forma de uma sequência de bits em círculos concêntricos - trilhas. Dois pequenos recortes na borda do cassete, localizados simetricamente em relação à janela do cabeçote, garantem seu posicionamento e fixação no flange. À direita deles, no cassete, há um recorte retangular, selado com uma faixa especial à prova de luz, que proíbe a gravação e o apagamento involuntário. O NGMD possui um sensor especial que detecta a presença deste recorte.
A densidade de gravação de dados depende da densidade das trilhas na superfície, ou seja, o número de trilhas na superfície do disco, bem como a densidade de gravação de informações ao longo da trilha. As cabeças magnéticas de leitura/gravação acessam a mídia através de uma aba metálica deslizante no corpo do disquete. Quando um disquete é inserido na unidade, a aba se move automaticamente. O design do disquete possui uma chave (canto recortado da caixa) que evita sua instalação incorreta no drive. O dispositivo de proteção contra gravação está localizado na parte inferior do disquete. Para identificar os parâmetros de densidade de gravação no disquete, existe um orifício quadrado no lado esquerdo.
Os disquetes de 133 mm têm 40 ou 80 trilhas. A numeração das faixas começa no lado externo (faixa zero) e termina na última interna. A posição da pista 00 é determinada no acionamento por meio de um sensor fotoelétrico especial. A pista em si é dividida em setores separados. Um disquete de 133 mm geralmente possui 8, 9 ou 16 setores por trilha. A capacidade de informação do setor é de 128, 256, 512 ou 1024 bytes. O início das seções de gravação é determinado por um orifício indicador redondo especial no disco e no cassete. Quando o orifício indicador gira sob o orifício correspondente no cassete, outro sensor fotoelétrico especial produz um sinal elétrico curto, que detecta a posição do início da trilha. As unidades de 3,5" funcionam com disquetes dupla-face com capacidade de 512 bytes de 9 ou 18 setores por trilha. Normalmente, um disco usa 80 trilhas.
Normalmente, quando adquiridas, as faixas e setores não são aplicados na superfície do disco. Neste caso, você precisa preparar o disco para gravar dados, ou seja, formatar. Para fazer isso, o software do sistema inclui um programa especial que formata o disco. A formatação é o processo de marcação de um disco em trilhas e setores. A unidade de disquete pertence ao grupo das unidades de acesso direto e é instalada dentro da unidade do sistema (Fig. 3 do Apêndice 1). O disco é inserido dentro do drive e quando o programa correspondente o acessa, o cabeçote de gravação/leitura é instalado no local desejado. Um único motor de acionamento gira o disco dentro de sua capa protetora. Quanto maior a velocidade de rotação, mais rápida a informação é lida, o que significa que a velocidade de troca de informações aumenta. O segundo motor move as cabeças de gravação/leitura ao longo da superfície do disco e determina outra característica da memória externa - o tempo de acesso à informação. Um mecanismo típico de unidade de disquete inclui um micromotor DC para girar o disco e um eixo. Normalmente, a velocidade de rotação é de 300 ou 360 rotações por minuto (rpm). A rotação do disco na velocidade necessária é garantida por um sistema servo.
Para controlar os motores, são utilizados circuitos eletrônicos que regulam e amplificam os sinais fornecidos aos motores: passo a passo (para acionar o carro) e corrente contínua (para acionar o disquete). Os amplificadores de gravação são projetados para amplificar os sinais de gravação fornecidos às cabeças magnéticas, e os amplificadores de leitura são usados para amplificar os sinais lidos pela cabeça magnética e prepará-los para processamento posterior.
O gabinete do disco possui uma área de acesso a dados e um meio de fixar o disco em um suporte dentro da unidade de disco para permitir a rotação do disco. O computador usa nomes especiais para se referir ao disco inserido na unidade. Como regra, uma unidade para ler informações de um disco de três polegadas recebe um nome na forma de uma letra latina com dois pontos A:, e para um disco de 5 polegadas ou segundo disco de três polegadas - na forma de um Letra latina com dois pontos B:. Ter dois pontos após a letra permite ao computador distinguir o nome da unidade da letra.
Para identificar as propriedades de um disquete, três sensores mecânicos de pressão são instalados na placa eletrônica próximo à parte frontal da unidade: dois - sob os orifícios de proteção e gravação de densidade, e o terceiro - atrás do sensor de densidade - para determinar o momento o disquete é abaixado. Um disquete inserido no slot entra na estrutura do disquete, onde a veneziana protetora desliza para fora dele, e a própria estrutura é removida da tampa e abaixada - o anel de metal do disquete repousa no eixo do motor do fuso, e a superfície inferior do disquete na cabeça inferior (lado 0). Ao mesmo tempo, é liberada a cabeça superior que, sob a ação de uma mola, é pressionada contra a parte superior do disquete. Na maioria das unidades de disco, a velocidade de abaixamento do quadro não é limitada de forma alguma, razão pela qual os cabeçotes causam um impacto perceptível nas superfícies do disquete, e isso reduz bastante o período de sua operação confiável. Alguns modelos de acionamento (Teac, Panasonic, ALPS) são equipados com um retardador de microelevação para um abaixamento suave do quadro. Para prolongar a vida útil dos disquetes e cabeçotes em unidades sem micro-lift, é recomendado que, ao inserir um disquete, segure o botão da unidade com o dedo, evitando que a moldura desça muito bruscamente. No eixo do motor do fuso existe um anel com trava magnética que, no início da rotação do motor, prende firmemente o anel do disquete, centralizando-o simultaneamente no eixo. Na maioria dos modelos de drive, um sinal do sensor de descida do disquete faz com que o motor dê partida brevemente para capturá-lo e centralizá-lo.
O inversor é conectado ao controlador por meio de um cabo de 34 fios, em que os fios pares são de sinal e os fios ímpares são comuns. A versão geral da interface permite conectar até quatro unidades de disco ao controlador, a versão para IBM PC - até duas. Na versão geral, os drives são conectados totalmente paralelos entre si, e o número do drive (0,3) é definido por jumpers na placa eletrônica; na versão para IBM PC, ambos os drives são numerados 1, mas são conectados por meio de um cabo no qual os sinais de seleção (fios 10-16) são invertidos entre os conectores dos dois drives. Às vezes, o pino 6 é removido do conector da unidade, que neste caso desempenha o papel de uma chave mecânica. A interface do drive é bastante simples e inclui sinais para selecionar um dispositivo (quatro dispositivos no caso geral, dois para o IBM PC), ligar o motor, mover os cabeçotes um passo, ligar e escrever, ler/escrever dados, também como sinais de informação do drive - o início da pista, um sinal de que os cabeçotes estão instalados na pista zero (externa), sinais de sensores, etc. Todo o trabalho de codificação de informações, busca de trilhas e setores, sincronização e correção de erros é realizado pelo controlador.
A unidade de disquete usa formatos de informações padrão que permitem unificar a unidade flutuante e o design do adaptador. Todas as informações gravadas em um disquete são divididas em setores. O número máximo de setores em uma trilha é determinado pelo sistema operacional do PC. A localização dos setores é numerada de 1 a M, a partir do início físico da trilha, determinado pelo sinal INDEX. O produto do número de trilhas pelo número de setores de gravação permite determinar a capacidade de informação do disquete. Cada setor inclui duas áreas: um campo de informações de serviço e um campo de dados do usuário. A informação do serviço constitui um identificador do setor, que permite distinguir este setor dos demais. Inclui várias partes separadas:
Antes de usar um disquete vazio, ele deve ser marcado. O procedimento para marcar (formatar) um disquete é que sequências de caracteres de serviço, chamadas de formato, sejam gravadas em determinados locais de cada trilha. O formato é projetado para que o equipamento adaptador de acionamento possa determinar inequivocamente a posição do cabeçote na pista, no momento certo passar da busca pelo setor desejado para a escrita ou leitura do campo de dados e verificar a precisão dos dados gravados e lidos . Todas as operações de escrita de dados são acompanhadas pelo acúmulo e gravação de dois bytes de checksum no final do campo de dados. Essa soma de verificação, também chamada de verificação de redundância cíclica (CRC), é calculada usando um polinômio, mostrado abaixo:
O setor de inicialização contém um pequeno programa para inicializar o sistema operacional na memória do computador. Independentemente do formato de gravação, este programa ocupa sempre um setor - o primeiro setor no cilindro número zero. Os setores a seguir contêm a Tabela de Alocação de Arquivos (FAT). Ele contém informações que determinam a localização dos arquivos gravados no disquete. Observe que fragmentos de arquivos adjacentes não são necessariamente gravados em setores adjacentes. Novos arquivos podem ocupar espaço liberado ao apagar arquivos gravados anteriormente. Devido à importância das informações armazenadas no FAT, existem duas cópias da tabela no disquete. Diretamente atrás da tabela de alocação de arquivos está um diretório. Ele registra os parâmetros básicos (por exemplo, comprimento) dos arquivos gravados na área de dados.
O primeiro setor do disquete do sistema é subestimado pelo Boot Record. Este registro é lido da partição ativa do disco pelo programa Master Boot Record e executado. A função do registro de inicialização é inicializar o sistema operacional. Cada tipo de sistema operacional possui seu próprio registro de inicialização. Mesmo para versões diferentes O programa de inicialização pode executar ações diferentes no mesmo sistema operacional.
Para endereçar um setor usando funções do BIOS, você deve especificar o número da trilha, o número da cabeça e o número do setor na trilha. O MS-DOS organiza a numeração de setores "ponta a ponta", na qual cada setor do disco lógico recebe seu próprio número. A ordem de numeração é escolhida de tal forma que quando o número do setor aumenta sequencialmente, o número da cabeça aumenta primeiro e depois o número da faixa. Isso é feito para reduzir o movimento do bloco principal ao acessar números consecutivos de setores lógicos.
Por exemplo, digamos que temos um disquete com nove setores em uma trilha. Um setor com número lógico igual a um está localizado na trilha zero e a cabeça zero é usada para acessá-lo. Este é o primeiro setor da pista, é numerado 1. O próximo setor na pista zero é o número lógico 2, o último setor na pista zero é o número lógico 9. O setor com número lógico 10 também está localizado na pista zero. Este também é o primeiro setor da pista, mas agora é usado para acessá-lo o número do cabeçote 1. E assim por diante, à medida que o número lógico do setor aumenta, os números do cabeçote e da trilha mudam.
Vamos começar com fitas magnéticas. Ao utilizar fitas magnéticas, as informações são registradas na forma de arquivos de acesso sequencial. Acesso sequencial significa que para ler um arquivo, você deve primeiro ler (ou visualizar) todos os arquivos anteriores. Durante a gravação, as informações podem ser adicionadas ao final da fita, após as informações que foram gravadas pela última vez.
Para um dispositivo como um disco magnético, é possível registrar informações usando um método de acesso serial ou direto. Usar o método de acesso direto permite que o programa posicione os cabeçotes imediatamente arquivo necessário. Por exemplo, ao ler um registro, você pode especificar o número do setor em uma trilha específica e o número do cabeçalho onde ele está localizado, ou o deslocamento do registro em relação ao início do arquivo em bytes.
O adaptador da unidade flutuante traduz comandos provenientes da ROM do BIOS em sinais elétricos que controlam a unidade flutuante e também converte o fluxo de pulsos lidos pela cabeça magnética em informações reproduzidas pelo PC. Estruturalmente, o equipamento eletrônico do adaptador HDD pode ser colocado na placa de sistema ou combinado com o equipamento de outros adaptadores (portas HDD, etc.). A maioria dos adaptadores é projetada para funcionar com unidades que usam o código MFM. O principal bloco funcional do adaptador da unidade flutuante é o controlador da unidade flutuante, que geralmente é projetado na forma de um LSI. Na maioria das vezes, o IC 8272 da Intel e o IC 765 da NEC são usados como controladores LSD para NGMD.
O controlador do drive flutuante executa um conjunto de comandos, dentre os quais os principais são posicionamento, formatação, leitura, escrita, verificação de status, etc. A execução de cada comando possui três fases: preparatória, execução e final. Na fase preparatória, o processador central transmite ao controlador bytes de controle, que incluem o código de operação e os parâmetros necessários à sua execução. Com base nas informações de controle na fase de execução, o controlador executa as ações especificadas pelo comando. Na fase final, o conteúdo dos registradores de status, que armazenam informações sobre os resultados da execução de um determinado comando e o estado do drive flutuante, é lido através do registrador de dados.
Um disco usado corretamente pode suportar vários meses de operação contínua em uma trilha, mas existem várias dezenas dessas trilhas no disco. Disquetes Alta qualidade fabricantes renomados e experientes garantem em média 70 milhões de passagens de cabeça ao longo da pista, o que na prática equivale a mais de 20 anos de uso intensivo. As regras para trabalhar com discos recomendam não tocar a superfície do disco com as mãos, não segurar os discos perto de um campo magnético forte e não expô-los ao calor. E, claro, é melhor fazer uma cópia caso o disco falhe. Neste ponto, gostaria de considerar as unidades de disco rígido.
A evolução dos computadores pessoais está associada a mudanças no armazenamento do disco rígido. Os discos magnéticos rígidos, ou “discos rígidos”, são um componente essencial de um computador pessoal. Os primeiros PCs não possuíam tais drives, os computadores PC XT já usavam esses dispositivos e os PC/AT Discos rígidos recebeu especial importância. A primeira unidade de disco rígido (HDD) apareceu em junho de 1956. E mesmo seu criador, Reynolds Johnson, chefe de um dos laboratórios de pesquisa da IBM, provavelmente dificilmente poderia imaginar o enorme impacto que sua invenção teria no desenvolvimento subsequente do indústria de computadores. O primeiro disco rígido tinha capacidade de cerca de 5 MB. O dispositivo consistia em 50 discos com diâmetro de 24 polegadas, girando a uma frequência de 1200 rpm, o tempo médio de busca foi de cerca de 1 s.
O nome do disco - rígido - enfatiza sua diferença em relação a um disco flexível: um revestimento magnético é aplicado sobre um substrato rígido. O termo disco rígido é usado principalmente em países de língua inglesa. O primeiro disco rígido apareceu à venda em 1973 e tinha o código “30/30” (disco dupla face com capacidade de 30 + 30 MB). Esta designação de código coincidiu com a designação do calibre do lendário rifle de caça Winchester, usado durante a conquista do Velho Oeste. Os desenvolvedores do disco rígido tinham as mesmas intenções; O nome "Winchester" tornou-se difundido. Atualmente, tanto os principais fabricantes quanto as subsidiárias produzem várias dezenas de tipos de discos rígidos. Muitas vezes são usados materiais de construção originais, existem diferenças na localização dos nós, mas os princípios operacionais da maioria dos drives são os mesmos.
As unidades de disco rígido combinam a(s) mídia(s) e o dispositivo de leitura/gravação em um único compartimento, bem como, muitas vezes, uma parte de interface chamada de controlador de disco rígido. Um disco rígido consiste em várias placas de alumínio revestidas com uma camada magnética, que, juntamente com o mecanismo de leitura e gravação, são encerradas em uma caixa hermeticamente fechada dentro da unidade do sistema. A unidade de disco rígido se parece com uma caixa de metal durável, na qual uma placa de circuito impresso com componentes eletrônicos está fixada na parte inferior (Fig. 4 do Apêndice 1). É totalmente vedado e protege o drive de partículas de poeira que, se entrarem no estreito espaço entre o cabeçote e a superfície do disco, podem danificar a camada magnética sensível e danificar o disco (Fig. 5 do Apêndice 1). Além disso, o gabinete protege o drive contra interferências eletromagnéticas. A caixa contém elementos para proteger a unidade no computador. Dentro da caixa estão todos os mecanismos e alguns componentes eletrônicos (Fig. 6 do Apêndice 1). Os mecanismos são os próprios discos nos quais as informações são armazenadas, os cabeçotes que escrevem e leem as informações dos discos e os motores que colocam tudo em movimento. Além disso, alguns tipos de drives possuem um filtro de ar interno que adsorve as partículas de poeira geradas durante a operação. A caixa só pode ser aberta em condições de produção, na chamada “zona limpa”, que evita a entrada de poeira e outras substâncias nocivas. Os drives de empresas estrangeiras, via de regra, possuem uma inscrição especial na tampa superior da caixa. A inscrição geralmente funciona como um selo de segurança e diz o seguinte: “A abertura do produto anulará a garantia”.
Muitas vezes você pode ver um indicador LED no painel frontal da unidade. Este indicador acende quando este HDD é acessado. Em PCs como IBM PC/XT de modelos mais antigos, ao usar dois HDDs, em Estado original ambos os indicadores estão desligados e um deles é ligado apenas enquanto o controlador está ativando a linha de interface “select”. Nos PCs do tipo IBM PC/AT e nos IBM PC/XT dos novos modelos, o indicador de um dos HDDs fica constantemente aceso, pois O controlador não zera o sinal “select” do HDD que foi acessado pela última vez. Assim, ao usar um HDD nesses modelos, ele fica sempre ligado. O fato real de acesso ao HDD está indicado no painel frontal do PC.
O número de discos pode ser diferente; o número de superfícies de trabalho é, portanto, duas vezes maior (duas em cada disco). Este último (assim como o material utilizado para o revestimento magnético) determina capacidade dura disco. Às vezes, as superfícies externas dos discos externos (ou um deles) não são utilizadas, o que permite reduzir a altura do drive, mas ao mesmo tempo o número de superfícies de trabalho é reduzido e pode acabar sendo estranho.
Cabeças magnéticas leem e gravam informações em discos. O princípio de gravação é geralmente semelhante ao usado em um gravador convencional. A informação digital é convertida em uma corrente elétrica alternada fornecida à cabeça magnética e depois transmitida ao disco magnético, mas na forma de um campo magnético, que o disco pode perceber e “lembrar”.
O revestimento magnético do disco consiste em muitas pequenas áreas de magnetização espontânea. Para ilustrar, imagine que o disco está coberto por uma camada de pequenas setas de bússola apontando em diferentes direções. Essas partículas de seta são chamadas de domínios. Sob a influência de um campo magnético externo, os campos magnéticos próprios dos domínios são orientados de acordo com sua direção. Após o término do campo externo, zonas de magnetização residual são formadas na superfície do disco. Desta forma, as informações gravadas no disco são salvas. Áreas de magnetização residual, quando o disco gira oposto ao vão da cabeça magnética, induzem nele uma força eletromotriz, que varia dependendo da magnitude da magnetização. Para ler corretamente os dados, um aumento na densidade de gravação requer uma diminuição correspondente na chamada “espessura magnética”. É numericamente igual ao produto do momento magnético pela espessura da camada magnética. A solução tradicional usada até agora é usar uma camada magnética mais fina, o que por sua vez significa menor energia do domínio magnético. Mas quanto menor o tamanho do domínio magnético, cuja direção de magnetização é determinada pelo bit de informação (0 ou 1), menos energia será necessária para mudar a direção de magnetização para o oposto. Parece que reduzir o tamanho do domínio é benéfico, mas uma vez que a energia necessária para mudar a direção da magnetização é comparável à energia térmica das partículas, os discos rígidos não podem mais ser considerados uma forma confiável de armazenar dados. Afinal, um aumento de vários graus na temperatura significará automaticamente a perda de dados sem possibilidade de recuperação, uma vez que a direção da magnetização mudará aleatoriamente sob a influência do calor. Este fenômeno é comumente chamado de efeito superparamagnetismo. É claro que nada disso acontecerá com as amostras de produção, já que nenhum fabricante concordará em aumentar o volume em troca do risco de perda de dados. Porém, a quantidade de informação cresce a cada dia, o que significa que há necessidade de aumentar o volume de informação armazenada em discos, ou seja, em algum momento, o lugar dos HDDs poderá ser ocupado por dispositivos de armazenamento de dados operando com uma tecnologia completamente diferente. Pesquisas nessa direção já estão em andamento.
As cabeças se movem com a ajuda de um motor de passo de precisão e parecem “flutuar” a uma distância de uma fração de mícron da superfície do disco, sem tocá-lo. O suporte de cabeça é uma asa que flutua acima da superfície devido ao fato de que a superfície carrega consigo partículas de ar, criando assim um fluxo que flui para a asa. Como resultado do registro das informações, áreas magnetizadas na forma de círculos concêntricos são formadas na superfície dos discos. Eles são chamados de trilhas magnéticas. Uma trilha é um anel concêntrico na superfície de um disco magnético no qual os dados são gravados, e um setor é uma divisão das trilhas do disco que representa a unidade básica de tamanho usada pela unidade. Os setores normalmente contêm 512 bytes.
Em sistemas com mecanismo de passo e motor, os cabeçotes se movem em uma determinada distância correspondente à distância entre os trilhos. A discrição dos passos depende das características do motor de passo ou é definida por servomarcas no disco, que podem ser de natureza magnética ou óptica. Uma cabeça servo adicional é usada para ler marcas magnéticas e sensores ópticos especiais são usados para ler marcas ópticas.
Em sistemas com acionamento linear, os cabeçotes são movimentados por um eletroímã e, para determinar a posição desejada, são utilizados sinais de serviço especiais, gravados na mídia durante sua produção e lidos no posicionamento dos cabeçotes. Muitos dispositivos usam uma superfície inteira e um cabeçote especial ou sensor óptico para sinais servo. Este método de organização de dados servo é chamado de gravação servo dedicada. Se os sinais servo forem gravados nas mesmas trilhas que os dados e um setor servo especial for alocado para eles, e a leitura for realizada pelos mesmos cabeçotes que a leitura dos dados, então esse mecanismo é chamado de gravação integrada de sinais servo. A gravação dedicada proporciona maior desempenho, enquanto a gravação integrada aumenta a capacidade do dispositivo.
Os atuadores lineares movem as cabeças muito mais rápido do que os atuadores de passo e também permitem pequenos movimentos radiais "dentro" da pista, permitindo que o centro do círculo da pista do servo seja rastreado. Isto alcança a melhor posição da cabeça para leitura de cada trilha, o que aumenta significativamente a confiabilidade dos dados lidos e elimina a necessidade de procedimentos de correção demorados. Como regra, todos os dispositivos atuadores lineares possuem um mecanismo automático para estacionar as cabeças de leitura/gravação quando a energia do dispositivo é desligada.
Estacionar as cabeças é o processo de movê-las para uma posição segura. Esta é a chamada posição de “estacionamento” das cabeças na área dos discos onde as cabeças repousam. Geralmente não há nenhuma informação registrada lá além dos dados do servo; esta é uma “Zona de Pouso” especial. Para fixar o cabeçote nesta posição, a maioria dos HDDs usa um pequeno ímã permanente quando os cabeçotes estão na posição de estacionamento - esse ímã fica em contato com a base da caixa e evita vibrações desnecessárias no posicionador do cabeçote. Quando o inversor é inicializado, o circuito de controle do motor linear “arranca” a trava, fornecendo um pulso de corrente aumentado ao motor que posiciona os cabeçotes. Várias unidades também usam outros métodos de fixação - baseados, por exemplo, no fluxo de ar criado pela rotação dos discos. Quando estacionado, o acionamento pode ser transportado em condições físicas bastante precárias (vibração, choque, choque), porque Não há risco de danos à superfície da mídia pelos cabeçotes. Atualmente, em todos os dispositivos modernos, o estacionamento do cabeçote é realizado automaticamente pelos circuitos internos do controlador quando a energia é desligada e não requer nenhuma operação adicional de software, como acontecia com os primeiros modelos.
Durante a operação, todas as partes mecânicas do inversor sofrem expansão térmica e as distâncias entre as trilhas, os eixos do fuso e o posicionador do cabeçote de leitura/gravação mudam. Em geral, isso não afeta em nada o funcionamento do drive, uma vez que são utilizados para estabilização. comentários, no entanto, alguns modelos recalibram o cabeçote de vez em quando, acompanhados por um som característico que lembra o som da partida inicial, ajustando o sistema às distâncias alteradas.
A divisão descrita acima é chamada de formatação LowLewel. Esta formatação de baixo nível é geralmente executada pelo fabricante usando Programas(como Speed Store ou Disk Manager) ou comandos DOS. Antes de utilizar os discos pela primeira vez, é necessário realizar sua formatação lógica - inicializá-los de forma especial (usando o programa de formatação). Contactar disco rígido o nome especificado pela letra latina C: é usado. Se instalado segundo difícil disco, é atribuída a próxima letra do alfabeto latino D:.
O computador fornece a capacidade, usando um especial programa do sistema dividir condicionalmente um disco em vários. Esses discos, que não existem como um dispositivo físico separado, mas representam apenas parte de um disco físico, são chamados de discos lógicos. As unidades lógicas recebem nomes usando as letras do alfabeto latino C:, D:, E:, F:, etc.
Os componentes eletrônicos do disco rígido estão ocultos na parte inferior do disco rígido. Ele decodifica os comandos do controlador do disco rígido e os transmite na forma de tensão variável para um motor de passo, que move as cabeças magnéticas até o cilindro desejado do disco. Além disso, controla o acionamento do fuso, estabilizando a velocidade de rotação do pacote de disco, gera sinais para os cabeçotes durante a escrita, amplifica esses sinais durante a leitura e controla o funcionamento dos demais componentes eletrônicos do acionamento. A placa eletrônica de uma unidade de disco rígido moderna é um microcomputador independente com processador, memória, dispositivos de entrada/saída próprios e outros atributos tradicionais inerentes a um computador. Pode haver muitos interruptores e jumpers localizados na placa, mas nem todos são destinados ao uso do usuário. Via de regra, os manuais do usuário descrevem a finalidade apenas dos jumpers associados à seleção do endereço lógico do dispositivo e seu modo de operação, e para drives com interface SCSI, os jumpers responsáveis por controlar o conjunto do resistor (estabilização da carga no circuito) .
Projeto, dispositivo geral e o princípio de funcionamento das unidades de disco rígido. Principais características dos discos rígidos: capacidade, tempo médio de pesquisa, velocidade de transferência de dados. As interfaces de disco rígido mais comuns (SATA, SCSI, IDE).
apresentação, adicionada em 20/12/2015
Dispositivos de armazenamento em discos magnéticos rígidos. Dispositivo de disco rígido. Interfaces de disco rígido. ATA, interface Serial ATA. Testando o desempenho de unidades de disco rígido. Análise comparativa de unidades Serial ATA e IDE.
apresentação, adicionada em 11/12/2013
Características técnicas dos discos rígidos e seu design. Fonte de alimentação e resfriamento de drives. Mau funcionamento de hardware e software. Programas para diagnóstico da superfície do drive, seus cabeçotes e eletrônica.
trabalho do curso, adicionado em 19/05/2013
Análise do princípio de funcionamento de drives em discos rígidos magnéticos de computadores pessoais. Cartão perfurado como suporte de informações em forma de cartão de papel ou papelão. Funções básicas do sistema de arquivos. Métodos para recuperar informações de matrizes RAID.
tese, adicionada em 15/12/2012
Características da memória externa do computador. Tipos de memória de computador e dispositivos de armazenamento. Classificação dos dispositivos de armazenamento. Visão geral da mídia magnética externa: unidades de acesso direto, unidades de disco rígido, discos ópticos e cartões de memória.
trabalho do curso, adicionado em 27/02/2015
As unidades de disquete permitem transferir documentos e programas de um computador para outro, armazenar informações que não são usadas constantemente no computador e fazer cópias de arquivo produtos de software contido no disco rígido.
resumo, adicionado em 18/07/2008
Armazenamento em disquete. Mídia de armazenamento removível. Dispositivo de armazenamento para disquetes magnéticos. Acesso às informações registradas em um cilindro. Características técnicas do disquete. Unidades de disco rígido e seu design.
apresentação, adicionada em 13/08/2013
Dispositivos de armazenamento externos para armazenar programas e dados. História do desenvolvimento do VZU. Características das unidades de fita magnética (streamers) e unidades de disquete. Tipos de unidades, dispositivos e tipos de disquetes. Um método para gravar em um disquete.
resumo, adicionado em 16/11/2011
Unidades de disco rígido. Discos rígidos com interface Serial ATA. Unidades de disco magnético. Unidades para leitura de CD-ROMs (discos compactos). Opções possíveis carregando o disco na unidade. Memória flash, suas principais vantagens em relação aos disquetes.
apresentação, adicionada em 20/09/2010
Exibindo texto ou informações gráficas em um computador. Entrada de dados e gerenciamento de vários objetos do sistema operacional. Dispositivos externos e internos. Dispositivos para gravação e leitura de informações em discos magnéticos flexíveis e rígidos.
As unidades de disco rígido do tipo Winchester são projetadas para armazenamento de informações de longo prazo como parte de um computador. O HDD recebeu o nome de “disco rígido” em 1973, quando a IBM fabricou um pacote lacrado de dois discos substituíveis de 30 MB cada. Os usuários associaram os números 30/30 ao calibre da espingarda de cano duplo Winchester 30/30, popular nos EUA. Em 1983, os computadores PC XT passaram a ser equipados com discos rígidos não removíveis com capacidade de 10 MB e tempo médio de acesso de 100 ms.
Armazenamento magnético feito de liga de alumínio ou placas de vidro com diâmetro de 3,5 ou 2,5 e espessura de 0,125 polegadas. Várias camadas finas de materiais magnéticos e não magnéticos que podem ser magnetizados em pequenas áreas da superfície são aplicadas às placas por pulverização catódica. As placas são montadas no eixo de um pequeno motor silencioso de fuso (D), que gira a uma velocidade constante (Fig. 4.3). Devido às restrições de tamanho e peso do HDD usado como parte de um computador pessoal, o número de placas é limitado e atualmente não excede 12.
Na maioria das vezes, o número de placas é de duas a quatro (cabeças de 4 a 8), e os discos externos às vezes têm apenas uma superfície de trabalho interna. Normalmente, os discos têm superfícies de trabalho inferiores e superiores. Uma cabeça de leitura/gravação (G1, ..., Gn) está conectada a cada superfície de trabalho. As cabeças são fabricadas com tecnologia de película fina e são cristais semicondutores especiais com uma lacuna em forma de U voltada para o wafer. O formato em U é usado para criar sustentação gerada pelo movimento do ar conforme os discos giram. A cabeça flutua acima da superfície com uma lacuna medida em mícrons.
Arroz. 4.3. Diagrama do disco rígido
Atualmente, unidades maiores que 1 GB usam cabeçotes magnetorresistivos (MR), que contêm um cabeçote de filme fino (TF) para gravação e um cabeçote magnetorresistivo para leitura. TFs são microbobinas de várias voltas em uma placa de circuito impresso em miniatura. Dentro da bobina existe um núcleo feito de liga de níquel-ferro com alta indução. A lacuna no núcleo é preenchida com alumínio não magnético por pulverização e protegida contra danos durante o contato com o disco. Para evitar danos às placas devido à entrada de partículas na área do espaço entre o cabeçote e a superfície de trabalho, os discos são colocados em um invólucro selado preenchido com um gás inerte.
A leveza da cabeça e o pequeno espaço entre o disco e a cabeça (cerca de 15 nm) permitem que a trilha seja magnetizada profundamente na superfície do disco, garantindo confiabilidade na gravação/leitura e armazenamento de informações. A segunda parte do cabeçote MR é um cabeçote de leitura, que é baseado em um sensor-resistor que muda sua resistência dependendo da força do campo magnético. Uma corrente de medição constante flui através do resistor, que varia dependendo da intensidade do campo magnético nos momentos t sz ao se mover ao longo da pista. Para reduzir a interferência de trilhas adjacentes, o resistor é elevado acima da trilha. Instalação de cabeças dado i-ésimo a pista (um cilindro com diâmetro di para todas as placas) é feita por uma bobina solenóide (K) movimentando a alavanca de acionamento (P), conforme mostrado na
arroz. 4.3. Para mover as cabeças para a trilha desejada, um sinal Ei é fornecido ao sistema de rastreamento automático (SU), que é comparado com o sinal X, proveniente de um cabeçote especial (Гс) ou de um contato de resistência variável R. Se houver diferença nos sinais comparados, o sistema de controle move a haste solenóide (Ш) em direção ao diâmetro requerido di. Quando a energia é desligada, o disco rígido é estacionado automaticamente por uma mola (P), deslocando os cabeçotes para a área interna do disco, geralmente para a última trilha. O número de trilhas é determinado pelo tipo de unidade e, para discos rígidos, seu número é de vários milhares. O pequeno espaço entre a cabeça e a superfície do disco torna possível alcançar altas densidades de gravação radial e linear (100 Gbit/polegada quadrada) e aumentar a capacidade do HDD para várias dezenas e até centenas de GB.
Os principais parâmetros de um disco rígido são capacidade (Ё), velocidade de troca (Vpr) e tempo de acesso aos dados (t cv). A capacidade de qualquer unidade é diretamente proporcional ao tamanho do formato (tamanho). O formato indica a seção do compartimento do HDD. Se for 3,5 ´ 1, então isso corresponde a uma baia de 4 ´ 1 ´ 6 polegadas usada para um disco rígido de 3,5². Quanto maiores forem os discos e seu número na embalagem, maior será a capacidade. Porém, com o aumento do diâmetro dos pratos nas diferentes trilhas, a velocidade de movimento do disco em relação aos cabeçotes muda significativamente, o tempo que os cabeçotes levam para se mover da trilha interna para a externa e o acesso médio o tempo aumenta. Esses parâmetros limitam a produção de discos maiores que 3,5. Portanto, ocorre constantemente um aumento na capacidade do disco devido ao aumento do TPI, BPI e métodos de codificação e decodificação de informações. Além disso, aumentar a densidade de gravação permite aumentar a velocidade de leitura de dados na mesma velocidade de rotação do disco. Assim, a Fujutsu no novo modelo de HDD 3,5 alcançou uma densidade de 10,2 GB em um prato 3,5 com cabeçotes MR e um canal PRML. Esta empresa produz HDDs silenciosos usando rolamentos com fricção líquida. Outras empresas produzem pratos com densidade de gravação de 20 GB ou mais.
A velocidade de troca é caracterizada por dois parâmetros: a taxa de transferência entre o HDD e a RAM e a velocidade de transferência entre o buffer do disco rígido e o disco de superfície V d. A taxa de transferência (taxa de transferência) entre o HDD e a RAM é medida pelo valor V pr (Mb/s) como a razão entre o tamanho do array transferido e o tempo gasto em seu envio. É determinado principalmente pelo tipo de interface.
2.1. Modos de transferência de dados
Dois modos são usados para transferir dados entre o disco rígido e a memória do PC:
Modo de entrada/saída do software PIO;
Modo de acesso direto à memória DMA.
No modo PIO, as informações do buffer de cache (RAM do disco rígido) do disco rígido são primeiro lidas pelo processador central e só então gravadas na RAM principal. Dependendo da duração do ciclo de leitura e do número de setores transferidos por acesso ao disco, os modos PIO0 (PIO Mode 0), PIO1, PIO2, PIO3, PIO4, PIO5 são diferenciados. As características dos modos PIO são fornecidas na tabela. 4.3.
No modo PIO, o conteúdo de um setor (512 bytes) é normalmente transferido por acesso ao HDD, e no modo PIO 4 – 16 (ou mais) setores. Isso ajuda a aumentar a taxa de transferência de dados de 3,3 MB no modo PIO 0 para 20 MB/s no modo PIO 5 usando interfaces IDE ou EIDE.
No entanto, o modo PIO é tradicionalmente usado em sistemas operacionais de tarefa única. Em sistemas operacionais multitarefa, os modos DMA de acesso direto à RAM são usados com mais frequência. A entrada/saída de dados neste modo é realizada na RAM do PC, ignorando o MP. A troca ocorre sob o controle do controlador do HDD nas pausas entre as chamadas do MP para a RAM, o que reduz a velocidade de troca, mas libera o MP da operação de transferência de dados entre a RAM e o HDD. Para modos DMA, são usados controladores e drivers especiais. Os modos DMA são divididos em DMA 0,1,2 de palavra única (palavra única) e DMA 33.100 de palavra múltipla (palavra múltipla), dependendo do número de palavras transferidas durante um ciclo de trabalho com o barramento do sistema. As características dos primeiros métodos de implementação do DMA são apresentadas na Tabela. 4.4.
Para fornecer maior desempenho de DMA, o modo Ultra DMA/33 foi inicialmente desenvolvido e implementado. A interface Ultra ATA/33 (Ultra DMA/33 e ATA-33), proposta pela Quantum, proporciona transferência de dados no modo Multiword DMA a uma velocidade de 33 Mb/s. Ao contrário do modo DMA 2, no modo Ultra ATA/33 (Fig. 4.4.) os dados são transferidos nas bordas inicial e descendente do sinal de clock (TI). Isso permite dobrar a velocidade de transferência sem aumentar a frequência do clock do barramento do sistema. O padrão Ultra DMA/33 difere das versões anteriores do IDE não apenas na velocidade de troca. Pela primeira vez, ele usa um mecanismo de detecção de erros de código de verificação cíclico.
Com o advento dos processadores Pentium, os controladores EIDE fornecem funcionalidade Bus Master. Isso se deve ao fato de que em sistemas operacionais multitarefa, para aumentar a velocidade dos cálculos, o MP fica livre de entrada/saída de dados entre a RAM e o HDD. Portanto, controladores de dispositivos externos (incluindo EIDE) começaram a ser equipados com seus próprios microprocessadores de E/S. Neste caso, o MP emite um comando ao controlador EIDE, que informa de onde deve obter os dados e em qual área de memória colocá-los. Depois de receber essas instruções, o controlador assume o controle do barramento do sistema (PCI) e executa operações para ler dados de dispositivos de armazenamento (por exemplo, de um disco rígido, unidades de CD-ROM, CD-R, CD-RW) diretamente na RAM usando o canal DMA. No entanto, o benefício no desempenho do PC ao usar a função Bus Master será significativo apenas quando vários aplicativos estiverem sendo executados simultaneamente. A função Bus Master é suportada por quase todos os chipsets modernos.
|
|
|
|
|

Arroz. 4.4. O princípio da transferência de dados nas interfaces ATA e Ultra ATA/33
Aula 16: Interfaces de dispositivos de E/S
IDE. IDE (ATA), EIDE (Fast ATA, ATA-2, ATA-3) e SCSI são usados há muito tempo como interface entre o disco rígido e o barramento do sistema na placa-mãe. A primeira interface IDE da Compaq e Western Digital, integrada em uma placa de disco rígido para barramentos ISA de 8/16 bits para computadores do tipo AT, chamada IDE ATA e lançada em 1986, foi padronizada em 1990 para atender dois HDDs. A interface IDE rapidamente ganhou popularidade entre fabricantes e usuários de PC. Ao mesmo tempo, o custo do disco rígido aumentou ligeiramente e o disco rígido começou a ser conectado diretamente a um slot na placa de sistema, que é um slot de barramento ISA truncado, ou a uma placa adaptadora. Anteriormente, a placa adaptadora tinha um controlador de HDD integrado, bem como interfaces paralelas e/ou seriais e uma porta de jogos. As novas placas-mãe integram todos esses componentes diretamente em um dos chipsets VLSI. A ideia mais importante na criação de um IDE é montar as partes principais da placa controladora no próprio HDD e garantir sua compatibilidade com qualquer placa-mãe. Ele é projetado para processamento simultâneo de um procedimento de entrada/saída de programa nos modos PIO - 0, PIO - 1, PIO - 2. No formato CHS, o limite de capacidade de um HDD com IDE é determinado pelo produto
Ё max = C ´ H ´ S (cilindros x cabeçotes x setores)
Ё máx = 65.536 ´ 16 ´ 255 ´ 512 (bytes) = 139,9 GB. Entretanto, o padrão BIOS das placas-mãe suportava recentemente apenas Ё max = C ´ H ´ S = 1024 ´ 255 ´ 63 ´ 512 (bytes) = 8,4 GB. Tendo em conta as restrições conjuntas do IDE e BIOS nos valores de C, H, S limitou a capacidade máxima do HDD sem o software correspondente a um valor igual a
Ё máx = 1024 ´ 16 ´ 63 ´ 512 (bytes) = 504 MB.
Capacidades de HDD de 504 MB já estão no computador com eu 486 não era mais suficiente, então o IDE ATA foi melhorado. O novo padrão EIDE permite expandir o limite máximo de capacidade do HDD.
EIDE(Fast ATA) (nome comercial da Western Digital) PIO-3 e MultiWord DMA1 com transferência multipalavras em modo de acesso direto à memória RAM. O Fast ATA2 aprimorado suporta os modos: PIO-4 e MultiWord DMA 2. O novo padrão EIDE, com BIOS modificado, através do controlador EIDE pode duplicar/quadruplicar o número de cabeçotes com redução proporcional no número de cilindros. Isso permite expandir o limite máximo de capacidade do HDD para 8,4 GB ou mais implementando o modo de endereço lógico LBA quando o FA< C, H, S >convertido para um endereço lógico de 28 bits< C *, H *, S * >. Porém, ao usar FAT, existe um problema que limita a capacidade do disco. Está no fato de que com o aumento da capacidade do disco, o tamanho mínimo do cluster (o número de setores de troca e a menor capacidade de gravação) aumenta de 8 KB (para HDD de até 504 MB) para 64 KB com discos de alta capacidade. Com arquivos pequenos, esses clusters não são completamente preenchidos. A memória está sendo usada de forma ineficiente.
O número de dispositivos conectados ao EIDE pode ser de até quatro, incluindo CD-ROMs ou streamers. Os novos modos EIDE permitem a leitura de dados contendo vários (2, 4, 8, 16 ou mais) setores padrão de 512 bytes (Múltiplos) em 1 troca. E a nova interface IDE (ATA - 3) suporta o padrão Ultra DMA e permite aumentar a velocidade de troca de discos rígidos Ultra DMA por RAM através do controlador Ultra DMA da placa-mãe. No modo Ultra, a velocidade de troca corresponde a: DMA 0 – 16,6 Mb/s; DMA 1 – 24,9 Mb/s; DMA 2 (DMA 33) – 33,3 Mb/s; UltraATA/66 – 66,6 Mb/s; UltraATA/100 – 100 Mb/s. Nova interface serial de 4 fios Série ATA-1.6 com velocidade de troca (3 ou 6) Gb/s está sendo desenvolvido para aumentar ainda mais a velocidade do computador e a compatibilidade com a interface IDE paralela.
SCSI foi projetado para aumentar a velocidade de troca de dispositivos externos com o barramento do sistema e o número de dispositivos periféricos conectados para sistemas operacionais multitarefa e multiusuário. Ele é conectado por meio de um adaptador host ao PCI e possui um barramento de dados de 8/16 bits. Os dispositivos são conectados ao barramento SCSI com números de ID = 0, 1, ..., 7. Os números de ID permitem a troca de dispositivos via SD sem a participação do MP usando formatos e comandos SCSI. A interface SCSI suporta Ёmax = 8,4 GB. Ao aumentar a velocidade de troca (“rápido” - rápido) e a largura do barramento de expansão (“largo” - multibit), possui as seguintes modificações:
SCSI-1 – 8 bits / até 5 Mb/s;
SCSI rápido (SCSI - 2) – 8 bits / até 10 Mb/s;
Ultra SCSI – 8 bits / até 20 Mb/s;
Fast Wide SCSI – 16 bits / até 20 Mb/s;
Ultra Wide SCSI (SCSI - 3) – 16 bits / até 40 Mb/s;
Ultra 160 SCSI – 160 Mb/s;
Ultra 320 SCSI – 320 Mb/s.
Quase todas as modificações do SCSI instalam um buffer de cache multissegmento com capacidade de mais de 512 KB para atender simultaneamente vários processos de E/S concorrentes. A interface SCSI tem algumas vantagens sobre a interface ATA:
Possibilidade de conectar até 27 dispositivos (por exemplo, Ultra SCSI-III);
Capacidade de conectar-se internamente e dispositivos externos;
Os discos rígidos SCSI giram em altas velocidades de 7.200, 10.000 ou 15.000 rpm e o tempo de acesso a eles é inferior a 5 a 7 ms;
O cabo SCSI plano de 50 núcleos pode ter até 6 m de comprimento.
Tendo mais do que equipamento de qualidade, o SCSI custa 1,5 vezes mais que o ATA e é usado com mais frequência em servidores.
2.3. Interliv
Nos discos rígidos modernos, o parâmetro interleave (o número de rotações do disco para ler toda a trilha), ou como também é chamado de fator Interleave (Fig. 4.5), não tem um efeito significativo no desempenho da troca se houver é suficiente capacidade de memória buffer de cache. No entanto, a consideração deste parâmetro nos permite descrever o princípio do disco rígido trocando setores com um buffer de cache. À medida que o disco gira, o cabeçote lê um setor de 512 bytes e envia os dados para o registrador buffer do controlador, de onde os dados são transferidos para o processador. O disco continua a girar, o cabeçote de leitura se move para o próximo setor, mas o controlador, com um tamanho de buffer de cache limitado, ainda está ocupado trocando dados com o processador. Portanto, para ler o próximo setor quando o controlador for liberado, o cabeçote deve aguardar uma revolução completa do disco ou pular alguns setores. Ao ler todo o cluster, que está localizado em setores vizinhos, os setores são lidos em sequência, sem demora. Se a capacidade do buffer for pequena e a transferência de dados para a RAM for necessária, alguns setores serão ignorados até que o buffer seja liberado. Assim, no modo 3:1 (Fig. 4.5, b) dois setores são ignorados.

Arroz. 4.5. Colocação de clusters nos modos de troca 1:1 e 3:1
Os discos de versões anteriores são organizados de tal forma que os setores do arquivo de dados estão localizados na trilha do disco não um após o outro, mas em uma ordem diferente, levando em consideração a interação e a capacidade de troca com o MP girando o Disco rígido. Ao mesmo tempo, ao posicionar o cabeçote, o controlador tem tempo suficiente para transmitir informações sem rotação desnecessária do disco. Ao ser liberado o controlador acessa o setor correspondente.
Os controladores modernos funcionam com um princípio diferente: para organizar a leitura contínua dos setores, os dados são lidos de vários setores ("com suspeita" de sua necessidade) e armazenados em um buffer de cache, de onde podem ser posteriormente recuperados. A vantagem deste método é que o controlador é colocado na unidade de disco, onde a mecânica e a eletrônica funcionam de maneira ideal.
A velocidade de transferência de dados V d entre o buffer do disco rígido e a superfície do disco, além do tempo de busca pela trilha desejada t cp, é significativamente afetada por: a velocidade de rotação dos pratos V c; número de setores físicos S na pista; o método de alterná-los (entreviver); tamanho do buffer de cache; tipo de dados (sequencial, fragmentado) e modo de troca. Portanto, a velocidade V d de troca entre o buffer do disco rígido e a superfície do disco y os melhores modelos geralmente não excede 10 Mb/s. Se a pista já estiver posicionada, então a velocidade de troca é determinada principalmente por duas grandezas: o tempo de busca do setor (igual à metade do período de rotação T da placa) e a velocidade de leitura do setor. Levando em consideração esses valores, V d é determinado aproximadamente pela fórmula:
V d = 0,5 ´ S ´ 512 / (T ´ I) (Kb/s),
onde S é o número de setores físicos (S = 80 - 160 e depende do número da faixa);
T = 1 / V in – período de rotação (em V in = 7.200 rpm T » 8 ms);
I – intercalação, o número de rotações do disco para ler a trilha inteira (para os melhores HDDs I = 1).
Substituindo os melhores parâmetros do disco, obtemos V d » 160 ´ 0,5 ´ 512 / 8 ´ 1024 = 5 MB/s. Ao levar em conta o tempo de busca t c para a trilha desejada, a taxa de troca entre o buffer de cache do disco rígido e a superfície do disco V d será menor e será determinada pela forma como os pratos são preenchidos. Os pratos podem ser preenchidos sequencialmente (primeiro um disco, depois outro, etc.) ou no modo track-fill, onde todas as trilhas mais externas de todos os pratos são preenchidas primeiro e depois a gravação é deslocada para o centro. O modo de preenchimento com trilhas é mais comum e, portanto, os HDDs que não são preenchidos com informações têm desempenho superior aos preenchidos, pois as informações nas trilhas internas são lidas mais lentamente e o número de setores nas trilhas não é o mesmo - há menos deles nos cilindros internos do que nos externos.
2.4. Características do disco rígido
Um bloco típico - circuito de controle de HDD, colocado em uma placa de circuito impresso de disco rígido, é mostrado na Fig. 4.6. Qualquer disco rígido IDE ou SCSI possui um pacote de discos magnéticos, um bloco de cabeçotes magnético-resistivos, um sistema de posicionamento, um canal de leitura e gravação, um separador de dados e um microcontrolador. O separador de dados separa os pulsos de clock e os dados do sinal de leitura de entrada. O microcontrolador reconhece os campos de identificação e de dados do setor usando marcas de endereço especiais. O campo identificador contém informações codificadas sobre o endereço do setor< C, H, S >. O MP estabelece o posicionamento correto dos cabeçotes e realiza microoperações de gravação/leitura como segue.
O sistema HDD digital recebe comandos do barramento do sistema do processador central através de um microcontrolador de troca de disco com o barramento SCSI e inclui um buffer de setor para armazenamento temporário dos dados envolvidos na troca. O MP CU do drive aceita o endereço lógico vindo do barramento do sistema< C *, H *, S * >, converte-o em um endereço físico< С, H, S >, e, através do MP e do controlador de controle do motor e cabeçote, posicionar o cilindro C correspondente. Por que o valor que determina a localização< C >cilindro na placa Ei, comparado com o sinal de posição da alavanca de acionamento X(ver Fig. 4.3). Se houver uma diferença diferente de zero Ei - X um sinal é recebido da unidade de controle que amplifica e excita a corrente no solenóide K, movendo o cabeçote mais profundamente ou até a borda do disco, dependendo do sinal da incompatibilidade.
Ao se mover, a alavanca de acionamento reduz o valor de Ei - X para zero e MP HDD de acordo com a posição do marcador (por código de campo de identificação) conecta o cabeçote necessário ao setor< S >e um canal de escrita/leitura, incluindo um codificador para escrita ou um detector e decodificador de pulso (DC) em modo de leitura.
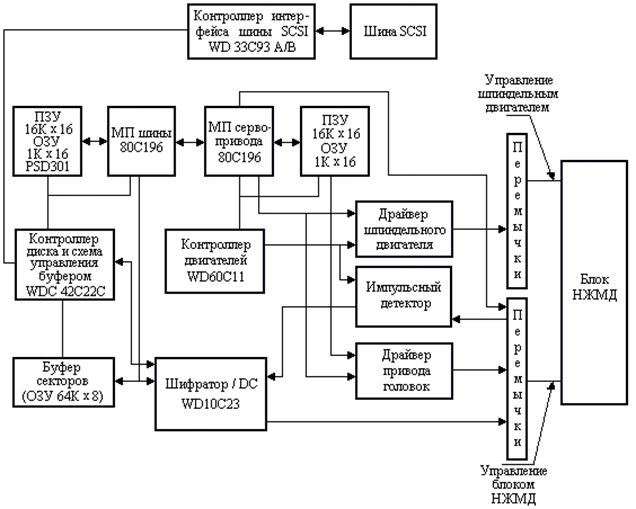
Arroz. 4.6. Circuito de controle de HDD
As características de alguns HDDs de 3,5 polegadas são apresentadas na tabela. 4.5. A tabela mostra que a velocidade de rotação V dos discos aumentou. Nos discos rígidos antigos era igual a 3.600 rpm, agora é mais frequentemente igual a 7.200 rpm. Somente em HDDs caros com Interface SCSIé igual a 15.000 rpm. As altas velocidades de rotação do disco (7.200 rpm) e o movimento das cabeças microscópicas permitem obter um tempo médio de acesso à informação de cerca de 8 ms nos melhores designs de HDD. O tempo que leva para encontrar a trilha desejada depende de posicão inicial cabeças e é o menor se a cabeça estiver em uma trilha adjacente (busca de trilha a trilha) t cd. O valor de t cd para os melhores HDDs é de 1 a 3 ms.
Se a busca for realizada de forma aleatória com transição igualmente provável para qualquer trilha, podemos falar do tempo médio de acesso (busca média) t cp. A capacidade dos novos modelos de HDD aumentou significativamente para 20 GB ou mais. Para acelerar o acesso aos dados, todos os HDDs são equipados com um buffer de cache com capacidade de 2 MB e geralmente de 8 MB. Para aumentar a confiabilidade do HDD, é usado o sistema de diagnóstico e notificação de falhas S.M.A.R.T. e métodos especiais para detectar falhas e corrigi-las.
| Tabela 4.5 Características do HDD | |||||
| Modelo Firme | Disco/cabeças E, GB | Vв, rpm | Buffer de cache, MB | tcf, senhora | Interface |
| IBMDTLA-307020 | 20.5 2/3 | 7 200 | - | 8.5 | ATA/100 |
| Maxtor DiamonMax80H8 | 81.9 4/8 | 5 400 | 9.0 | ATA/100 | |
| Seagate Barracuda 180 ST1181677LW | 181.6 12/24 | 7 200 | 8.2 | Ultra 160 SCSI | |
| Western Digital WD200BB | 1/2 | 7 200 | 10.9 | ATA/100 | |
| Fujitsu AL7LX MAM 3367NP | 36.7 4/8 | 15 000 | 3.5 | Ultra 320 SCSI ATA/100 |
Tecnologia S.M.A.R.T foi desenvolvido com a participação dos maiores fabricantes de discos rígidos. Para analisar a confiabilidade de um disco rígido, são utilizados dois grupos de parâmetros: parâmetros de envelhecimento natural do disco e parâmetros atuais.
Os parâmetros do primeiro grupo incluem:
Número de rotações do motor durante a operação;
O número de movimentos do cabeçote de leitura/gravação durante a operação.
Os parâmetros do segundo grupo incluem, por exemplo, o seguinte:
Distância entre a cabeça de leitura/gravação e a superfície de trabalho;
Velocidade de troca de dados entre discos e cache do disco rígido;
Número de setores defeituosos reatribuídos;
Velocidade de busca de dados no disco.
Todas as informações S.M.A.R.T. gravado em faixas especiais. Existem três versões (I, II, III) da tecnologia S.M.A.R.T. Em S.M.A.R.T. III, é realizada a previsão de erros, realizada a varredura de superfície e, além das versões anteriores I, II, identifica e restaura setores problemáticos. O BIOS permite ao usuário controlar o S.M.A.R.T. com a emissão de mensagens sobre o status do HDD. Ao mesmo tempo, o tempo médio entre falhas de um disco rígido MTBF, como tempo estatístico médio entre falhas, é igual a 500 mil horas (com 40 - 50 mil ciclos liga/desliga), o que é uma ordem de grandeza superior a outros componentes do computador.
IBM, Fujitsu, Quantum e outras empresas de HDD usam wafers de vidro e silício em vez de alumínio para aumentar a densidade e a confiabilidade da gravação devido à sua maior rigidez e pureza. Isso também ajuda a reduzir o peso. Além disso, muitas empresas, por exemplo, a IBM, estão se esforçando para reduzir o tamanho dos wafers (quanto menor o wafer, menos vibração) através da introdução de novos padrões de 27 mm. Previsões da empresa: o aumento na densidade de gravação de informações chegará em breve a 300 Gbit por metro quadrado. polegada. A busca por uma alternativa aos discos magnéticos continua. Entre essas inovações estão filmes magnéticos orgânicos e estruturas com células depositadas. Os fabricantes acreditam que as novas tecnologias substituirão os meios magnéticos.
As principais desvantagens dos discos magnéticos são: envelhecimento dos materiais do substrato, que limita a vida útil a 5 anos; perda de dados por exposição a campos eletromagnéticos aleatórios; desmagnetização durante o armazenamento; sensibilidade a choques e tremores.
Aula 17: Armazenamento óptico
Em 1972, Phllips demonstrou o sistema Video Long Play. Ele usou o princípio serif para registrar dados. Marcou o início do desenvolvimento das tecnologias de CD e, posteriormente, de DVD. O primeiro padrão de armazenamento óptico de CD-ROM, que incluía um sistema para gravação de dados digitais arbitrários em um CD, foi desenvolvido em 1984 pela Philips e pela Sony.
O CD-ROM de memória permanente é produzido em massa desde 1988 como um dispositivo de armazenamento de informações com capacidade de 650 MB. Essas informações correspondem a aproximadamente 330 mil páginas de texto ou 74 minutos de áudio de alta qualidade. No momento, existem vários padrões de CD-ROM - AAD, DDD, ADD. As letras desta abreviatura refletem as formas de onda de áudio usadas para criar o disco: a primeira para a gravação original, a segunda para processamento e mixagem e a terceira para o sinal mestre final a partir do qual o disco é formado. "A" denota a forma analógica, "D" denota a forma digital. O sinal mestre de um CD sempre existe apenas em formato digital, portanto a terceira letra da abreviatura é sempre “D”. Ao gravar e processar um sinal em formato analógico, os harmônicos mais elevados são preservados, mas o nível de ruído aumenta. Quando processados digitalmente, os harmônicos mais altos são cortados à força na metade da frequência de amostragem.
Os CD-ROMs de CD-ROM são feitos de 1,2 mm de espessura e diâmetro externo de 12 cm, com furo interno de 15 mm em material polimérico, que é coberto na parte inferior por um filme de liga de alumínio (Fig. 4.7.). Este filme é um portador de informação, que após a gravação é protegido por uma camada adicional de verniz. A camada superior não funciona e rótulos e inscrições são aplicados a ela.
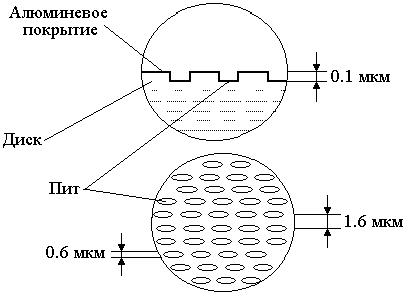
Arroz. 4.7. Camada de informação em CD-ROM
A produção dos discos ocorre em diversas etapas, entre elas:
Gravação por queima de traços com feixe de laser ("notching", pit) por mais de 1,5 horas em um disco master;
Obtenção de cópias de matrizes de metal duro do disco mestre;
Fazendo uma cópia de discos de trabalho imprimindo (estampando) com matrizes.
Como resultado da impressão, uma trilha espiral de 0,6 µm de largura com uma distância entre voltas de 1,6 µm com ranhuras na forma de uma linha de 0,12 µm com TPI = 16.000 permanece na superfície do disco. A trilha começa perto do orifício central e termina a 5 mm da borda externa. O comprimento da espiral chega a 5 km. O princípio de funcionamento de uma unidade de CD-ROM pode ser simplificado usando a Fig. 4.8. O disco é girado por um motor (D1), cujo sistema de controle garante uma velocidade constante de movimento da pista em relação ao leitor em qualquer volta interna ou externa da espiral. Ao mesmo tempo, a velocidade de leitura de dados para geração de som é estritamente constante e igual a 75 blocos por segundo (150 Kb/s).
Cada bloco contém 2.352 bytes. Destes, 2.048 são úteis e 288 são de controle, que servem para restaurar dados (“falhas” por arranhões, detritos) de até 1.000 bits, 16 para sincronização. Os bits de verificação permitem evitar erros com uma probabilidade de 10 -25. O motor de posicionamento (D2) é projetado para mover o carro móvel (PC) com espelho e lente de foco até a rotação desejada da pista espiral de acordo com comandos do microprocessador integrado.

Arroz. 4.8. Princípio de funcionamento de uma unidade de CD-ROM
Um laser semicondutor (SSL) emite um feixe infravermelho com comprimento de onda 4 vezes a profundidade do curso. Este feixe passa pelo prisma de separação (RP), refletindo no espelho (3). Então, através da lente de foco (FL1), ele é direcionado com precisão para a trilha e refletido a partir dela com intensidades diferentes dependendo da faixa ou platô. Como o diâmetro do ponto de luz formado na trilha pelo feixe de laser é maior que o tamanho da faixa, quando o feixe é refletido simultaneamente da parte inferior da faixa e da superfície principal, ocorre o cancelamento da interferência entre as ondas refletidas, e a intensidade do feixe refletido diminui. Na ausência de acidente vascular cerebral, o ponto de luz é refletido igualmente, não ocorre interferência e a intensidade do feixe refletido é mantida. O feixe refletido da trilha é percebido pela lente focalizadora (FL1) e através do RP e lente focalizadora (FL2) é percebido por um fotossensor (PD), que converte sinais ópticos em elétricos. O sinal elétrico obtido do PD ao visualizar um acidente vascular cerebral em um CD é considerado lógico. Os sinais elétricos são então transmitidos para placa de som ou na RAM. Quando transmitidas para a placa de som (placa), as sequências digitais são convertidas em sinais analógicos, são amplificados e podem ser ouvidos através de fones de ouvido ou alto-falantes.
Se os sinais do disco representarem matrizes de dados digitais para o computador, eles serão convertidos em código binário paralelo pelo microprocessador integrado, que poderá então transferi-los para os segmentos de RAM do computador. Ao contrário das gravações de áudio, que são transferidas de forma síncrona para a placa de som, os dados digitais de um CD podem ser lidos na RAM em velocidades 4, 6, 8, 10 vezes mais rápidas. Unidades e CD-ROMs que possuem essas velocidades são chamadas de velocidade 4 a 10. Eles leem dados e os transferem para o barramento do sistema em velocidades de 600, 900, 1200, 1500 KB/s e têm o melhor tempo médio de acesso ao bloco de disco de cerca de 100 ms. Em velocidades acima de 5.000-6.000 rpm, a leitura confiável torna-se quase impossível, então os modelos mais recentes de CD-ROMs de 12 velocidades ou superiores operam no modo CAV (velocidade angular constante) ao ler dados, girando o disco na velocidade mais alta possível. Neste modo, a velocidade com que os dados chegam do disco varia dependendo da posição do cabeçote, aumentando do início ao fim do disco. A velocidade indicada no passaporte (por exemplo, 24x) é alcançada apenas nas seções externas do disco e nas seções internas cai para aproximadamente 1200-1500 Kb/s. Em drives com velocidades de 20 e 24, o desempenho depende de onde as informações do CD são lidas e sua velocidade média corresponde a cerca de x14 com suporte Modo BIOS PIO-4.
3.1. Armazenamento óptico regravável
Além do CD-ROM, os padrões CD-R (gravável) e CD-RW (regravável) são cada vez mais utilizados. Para gravação única de CD-R, são usados os chamados “blanks”, que são discos compactos comuns em que a camada reflexiva é feita principalmente de filme de ouro ou prata. Entre ele e a base de policarbonato existe uma camada de gravação de material orgânico (corante), que escurece quando aquecido. Durante o processo de gravação, o feixe de laser aquece pontos selecionados da camada, que escurecem e param de transmitir luz para a camada reflexiva, formando áreas semelhantes a “entalhes”.
Os discos CD-RW regraváveis possuem uma estrutura de sete camadas, diferente Discos CD-R, que contém cinco camadas, como mostrado na Fig. 4.9. O CD-RW utiliza uma camada intermediária de metal-plástico, que muda seu estado de fase de amorfa para cristalina e vice-versa sob a influência de um feixe. Como resultado, a transparência da camada muda. O registro das mudanças de estado ocorre devido ao fato de que o material da camada de registro, quando aquecido acima de uma temperatura crítica, entra em um estado amorfo e nele permanece após o resfriamento, e quando aquecido a uma temperatura significativamente abaixo da temperatura crítica, restaura o estado cristalino. Esses discos podem suportar milhares a dezenas de milhares de ciclos de reescrita. No entanto, sua refletividade é significativamente menor que a dos CDs descartáveis, tornando-os difíceis de ler em unidades convencionais. Para ler CD-RW, você precisa de uma unidade com controle automático de ganho do fotodetector (Auto Gain Control), embora algumas unidades convencionais de CD-ROM e reprodutores domésticos sejam capazes de lê-los junto com discos normais. A capacidade da unidade de ler CD-RW é chamada Multiread.
Um disco regravável pode ter a mesma estrutura e sistema de arquivos de um CD-R ou pode ter um sistema de arquivos UDF especial que permite que arquivos individuais no disco sejam criados e destruídos dinamicamente.
|

Figura 4.9. Estrutura de gravação em CD-R e CD-RW
3.2. Disco Digital Versátil
O padrão DVD foi desenvolvido em 1995 em conjunto por diversas empresas (Hitachi, JVC, Philips, etc.). Os discos DVD podem gravar não apenas vídeo, mas também áudio e quaisquer outros dados, por isso são mais frequentemente usados como um disco digital versátil (Versátil). A principal diferença entre DVDs e CDs é a diferença na quantidade de informações. A capacidade do DVD é aumentada de várias maneiras:
Em primeiro lugar, para ler DVDs, utiliza-se um laser com comprimento de onda menor do que para ler CDs, o que aumentou significativamente a densidade de gravação;
Em segundo lugar, o padrão prevê discos de camada dupla, para os quais os dados são gravados em duas camadas de um lado. Neste caso, uma camada é translúcida, o que permite a leitura “através” da primeira camada.
Com o aumento da densidade de gravação e a diminuição do comprimento de onda do laser de leitura, a exigência de espessura da camada plástica protetora mudou: para discos DVD é de apenas 0,6 mm, ao contrário dos 1,2 mm usados nos discos CD. Porém, para manter as dimensões usuais do disco e evitar a fragilidade excessiva dos discos DVD, eles são preenchidos com plástico em ambos os lados para que a espessura final do disco seja igual a 1,2 mm. Isto permitiu gravar dados em ambos os lados dos DVDs e assim duplicar a sua capacidade. Tipos principais Discos DVD a seguir:
DVD-5 (4,7 GB) com gravação de dados em uma camada de um lado;
DVD-9 (8,5 GB) com gravação de dados em duas camadas de um lado;
DVD-10 (9,4 GB) com gravação de dados em dois lados, uma camada cada;
DVD-14 (13,24 GB) com gravação de dados em duas camadas de um lado e uma camada do outro;
DVD-18 (17 GB) com gravação de dados em dois lados, duas camadas.
As características dos discos ópticos Samsung são apresentadas na tabela. 4.6.
Como um disco DVD é frequentemente usado para transferir gráficos, multimídia e assistir vídeos, a reprodução de imagens de alta qualidade (720x576 pixels com profundidade de cor de 24 bits, no padrão europeu PAL) requer uma taxa de transferência de dados de 30 Mb/s, e para para assistir a um filme, você precisa de uma capacidade de disco de cerca de 100 GB. Para reduzir os requisitos de taxa de transferência de dados (Vpr) e aumentar o volume de dados, é utilizado o algoritmo de compressão MPEG-2. Isso permite reduzir a taxa de fluxo de dados para 3 - 4 Mb/s. Ao compactar, até 97% das informações redundantes são removidas praticamente sem danos à qualidade da imagem. Para recuperar os dados lidos de um DVD, a informação deve ser decodificada, ou seja, restaurar informações redundantes excluídas durante a compactação. Isso pode ser feito programaticamente, sem o uso de hardware especializado, ou usando um decodificador de DVD de hardware.
Para DVDs, assim como para CDs, existem formatos de regravação - são DVD-RAM e DVD+RW com capacidade de até 2,6 GB e até 3 GB, respectivamente, mas ambos os formatos são incompatíveis entre si. Seu princípio de reescrita é o mesmo das tecnologias de CD, mas a gravação é feita em camadas e a densidade do disco é maior.
Atualmente, diversas interfaces são utilizadas para unidades de CD e DVD: EIDE, ATAPI, SCSI e USB.
| Tabela 4.6 Características das unidades ópticas | ||
| Opções | CD-RW (SW-208) | DVD-ROM (SD-612) |
| Velocidade de gravação de CD (Kbps) | 1200 (8x) | - |
| Velocidade de gravação de CD (Kbps) | 600 (4x) | - |
| Velocidade de leitura de CD (Kb/s) | 4800 (32x) | 6.000 (40x) |
| Velocidade de leitura de DVD (Kb/s) | - | 16200 (12x) |
| Interface | EIDE | EIDE |
| Tamanho do buffer (KB) | ||
| Potência de saída de áudio (W) | 0,7 | 0,7 |
| Gravação de CD-R 650 (MB) | + | - |
| Gravação CD-RW 700/650/550 (MB) | + | - |
3.3. Unidades ópticas de nova geração
Os dispositivos de armazenamento de nova geração, os chamados discos fluorescentes (discos FM), utilizam o princípio do “fotocromismo”. Esse fenômeno se manifesta em um material orgânico contendo partículas fotocrômicas que, quando expostas a um feixe de laser de determinado comprimento de onda, emitem um brilho fluorescente. Inicialmente, o fotocromo não possui propriedades fluorescentes. A gravação é realizada sob a influência de um laser de alta potência nas áreas onde se inicia uma reação fotoquímica, a partir da qual começam a aparecer propriedades fluorescentes. Durante a leitura, as partículas fotocromáticas nas áreas irradiadas pelo laser são novamente excitadas por um laser de menor potência e começam a fluorescer. Este brilho é capturado pelo fotodetector e tomado como valor “1”. A peculiaridade do disco FM se reflete nas características do drive:
Multicamadas, transparente e uniforme;
Baixa perda de sinal ao passar por diversas camadas;
O brilho fluorescente dos elementos é “transparente” para todas as camadas do disco;
Menos sensível que o CD/DVD a diversas deficiências dos dispositivos de leitura;
O brilho fluorescente de qualquer camada não é coerente, a interferência presente nas tecnologias de CD/DVD é eliminada;
A tecnologia fluorescente é compatível com CD e Formatos de DVD distribuição de dados em cada camada.
Características comparativas disco fluorescente com capacidade de 50 GB são apresentados na tabela. 4.7.
Da mesa 4.7 mostra que o disco FM pode armazenar e usar mais dados do que CDs ou DVDs, e os discos FM poderão em breve substituir outros dispositivos de armazenamento óptico.
Aula 17: Barramentos microprocessados: sistemas e ciclos de troca
A coisa mais importante que um desenvolvedor de sistemas microprocessados deve saber são os princípios de organização da troca de informações nos barramentos de tais sistemas. Sem isso é impossível desenvolver o hardware do sistema, e sem o hardware nenhum software funcionará.
Ao longo dos mais de 30 anos que se passaram desde o surgimento dos primeiros microprocessadores, certas regras de troca foram desenvolvidas, que são seguidas pelos desenvolvedores de novos sistemas de microprocessadores. Essas regras não são muito complicadas, mas é necessário conhecê-las com firmeza e segui-las à risca para um trabalho bem-sucedido. Como a prática tem mostrado, os princípios de organização da troca de barramentos são muito mais importantes do que os recursos de microprocessadores específicos. Os barramentos de sistema padrão duram muito mais que um processador específico. Os desenvolvedores de novos processadores são guiados pelos padrões de barramento existentes. Além disso, alguns sistemas baseados em processadores completamente diferentes usam o mesmo backbone de sistema. Ou seja, o backbone acaba sendo o fator formador de sistema mais importante em sistemas microprocessados.
A troca de informações em sistemas microprocessados ocorre em ciclos de troca de informações. O ciclo de troca de informações é entendido como o intervalo de tempo durante o qual ocorre uma operação elementar de troca no barramento. Por exemplo, enviar código de dados do processador para a memória ou enviar código de dados de um dispositivo de entrada/saída para o processador. Vários códigos de dados, até mesmo uma matriz de dados inteira, também podem ser transmitidos dentro de um ciclo, mas isso é menos comum.
Os ciclos de troca de informações são divididos em dois tipos principais:
· Ciclo de escrita (saída), no qual o processador escreve (saída) informações;
· Ciclo de leitura (entrada) em que o processador lê (insere) informações.
Alguns sistemas microprocessadores também possuem um ciclo de leitura-modificação-gravação ou entrada-pausa-saída. Nesses ciclos, o processador primeiro lê as informações da memória ou de um dispositivo de E/S e, de alguma forma, as transforma e as grava novamente no mesmo endereço. Por exemplo, o processador pode ler o código de uma célula de memória, incrementá-lo em um e gravá-lo de volta na mesma célula de memória. A presença ou ausência deste tipo de ciclo está associada às características do processador utilizado.
Um lugar especial é ocupado por ciclos de acesso direto à memória (se o sistema tiver modo DMA) e ciclos de solicitação e fornecimento de interrupções (se houver interrupções no sistema). Quando falarmos sobre tais ciclos no futuro, isto será mencionado especificamente.
Durante cada ciclo, os dispositivos participantes da troca de informações transmitem informações e sinais de controle entre si em uma ordem estritamente estabelecida ou, como também dizem, de acordo com o protocolo de troca de informações aceito.
O tempo de ciclo pode ser constante ou variável, mas sempre inclui vários ciclos do sinal do relógio do sistema. Ou seja, mesmo em um caso ideal, a frequência de leitura das informações pelo processador e a frequência de gravação das informações são várias vezes menores que a frequência do clock do sistema.
A leitura de códigos de comando da memória do sistema também é feita por meio de ciclos de leitura. Portanto, no caso de uma arquitetura de barramento único, os ciclos de leitura de comando e os ciclos de transferência de dados (leitura e gravação) se alternam no barramento do sistema, mas os protocolos de troca permanecem inalterados independentemente do que é transmitido - dados ou comandos. No caso de uma arquitetura de barramento duplo, os ciclos de leitura de comandos e escrita ou leitura de dados são divididos em diferentes barramentos e podem ser executados simultaneamente.
| Artigos relacionados: | |
|
Zera de tela alta com firmware 5 1
Antes de aprender como atualizar o Highscreen Zera F e o Highscreen Zera F... Como limpar cookies no Mozilla Como limpar cache e histórico no Mozilla
Se você precisa de um navegador confiável que não o decepcione durante... Vamos desmontar o disco rígido. Desmontamos o disco rígido. Desmontando um disco rígido de laptop
Os veículos motorizados tornaram nossas vidas muito mais fáceis. Com o seu... | |




